One-Stop Topographic Mapping in a No-Fly Zone with the CHCNAV RS10
2026-06-25
Professional surveyors face a familiar trade-off on large topographic sites. A traditional GNSS RTK rover is accurate but slow, often turning a big site into days of point-by-point walking. Drone mapping is fast in the open, but it stops at No-Fly Zones, struggles under tree canopy and cannot see the ground beneath it. On a recent 60,000 m2 project in Lexington, Kentucky, both of those limits were in play at once. iGage Mapping Corporation ran the job with the CHCNAV RS10 SLAM scanner and the CHCNAV software ecosystem, and finished field acquisition in about half an hour, with a production-ready topographic map delivered the same day.
The Project: A 60,000 m² Survey Where Drones Could Not Fly
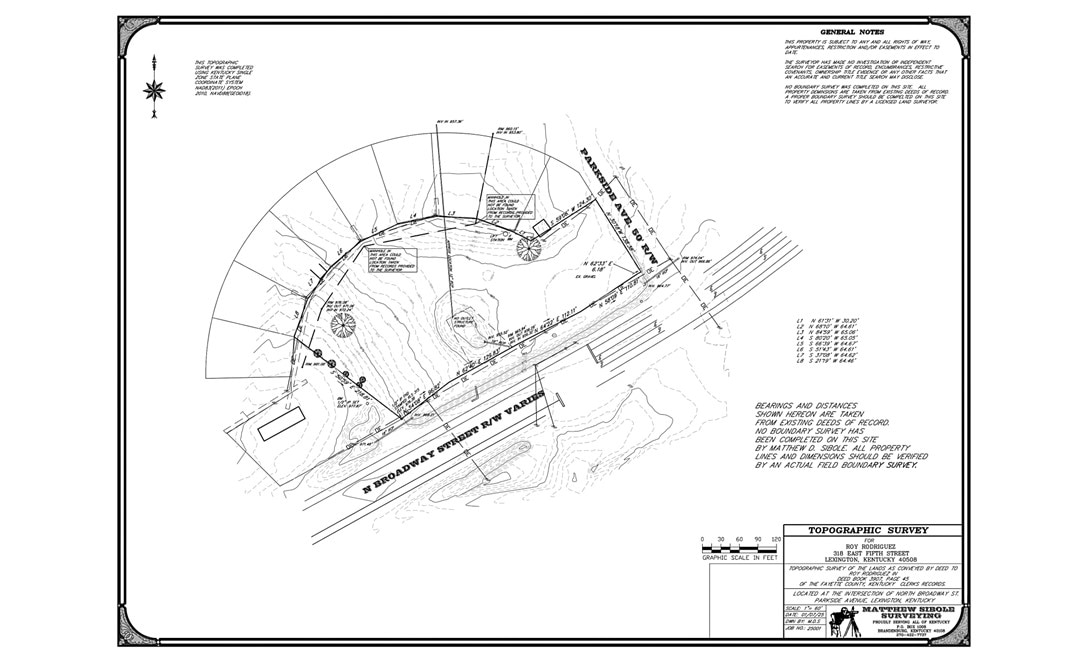
Matthew Sibole, a licensed land surveyor in Kentucky working with iGage, needed to deliver a full topographic survey of a 14.8-acre site in Lexington. The brief was demanding on three fronts at once:
Professional deliverables: vector line drawings of buildings, roads, vegetation and manholes, contour lines at one US-foot intervals, and elevation grids, all to within one US-foot of measured accuracy.
A No-Fly Zone: the site sat inside restricted airspace where aerial drone survey was not permitted, ruling out the fast option most teams would reach for.
A tight schedule: the client needed survey-grade results inside 24 hours.
A point-by-point GNSS RTK rover could have hit the accuracy, but not the deadline. Drones could have hit the deadline, but were not allowed in the air. The job called for a method that captured ground detail quickly, on foot, without giving up positioning accuracy.
The RS10 captures a continuous point cloud as the operator walks the site, enabling efficient survey-grade topographic data collection without aerial mapping or point-by-point measurements.
Why SLAM Beat the RTK Rover and Drones on This Site
A standard GNSS receiver records one point at a time. The CHCNAV RS10 instead captures a dense point cloud continuously while the operator walks, combining RTK, LiDAR and visual SLAM in a deep fusion. That fusion is what lets it hold absolute accuracy where a drone or a bare GNSS rover would fail: under canopy, in urban canyons with obstructed sky, and inside the kind of No-Fly Zone that defined this project. Because RTK constrains the SLAM trajectory, the operator does not need to walk loop closures to keep the data aligned.
Factor
GNSS receiver
UAV LiDAR
SLAM scanner (RS10 + CoProcess)
Field acquisition
Slow, point by point; gaps under cover
Fast aerial coverage
Fast scanning at walking speed
Operating environment
Open sky only
Open sky; blocked by No-Fly Zones
Indoor, outdoor, under canopy, urban canyons
Positional accuracy
Highest (centimetre absolute)
Moderate to high (varies with altitude)
High (centimetre-level, RTK-constrained SLAM)
Investment level
$
$$$$
$$
For an open, no-restriction site a drone may still be the fastest tool. The moment canopy, obstructions or a No-Fly Zone enter the picture, the walking SLAM workflow is the one that still finishes the job at survey grade.
The One-Stop Workflow, Field to Finish
The strength of the RS10 on this project was not only the scanner, but the way the whole pipeline stayed inside one ecosystem, from field correction to final CAD drawing, with no third-party format conversions in between. The work ran in three stages.
Step A: Field Acquisition
A base station was set up over a known point, with a local CORS service available for real-time corrections. The RS10 connected to the SmartGo mobile app, and with an RTK-fixed solution the operator walked the entire 60,000 m2 site. The RTK and SLAM deep fusion held absolute accuracy throughout without requiring loop closures. Field capture took roughly 30 minutes.
Step B: Data Optimisation
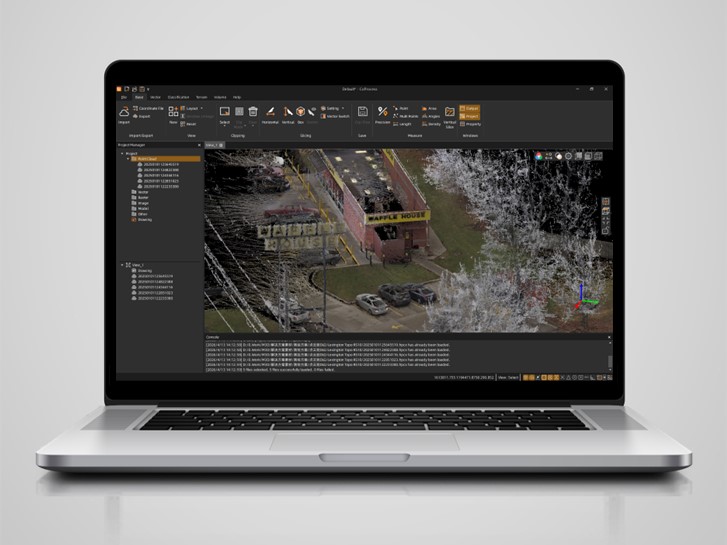
The raw scan was imported into CoPre, where a single click ran full SLAM post-processing and produced a cleaned, optimised point cloud. CoPre exports the industry-standard LAS, LAZ and E57 formats, and also the RCP (Recap) format, which opens directly in AutoCAD with no intermediate conversion step.
Step C: In-Office Drawing
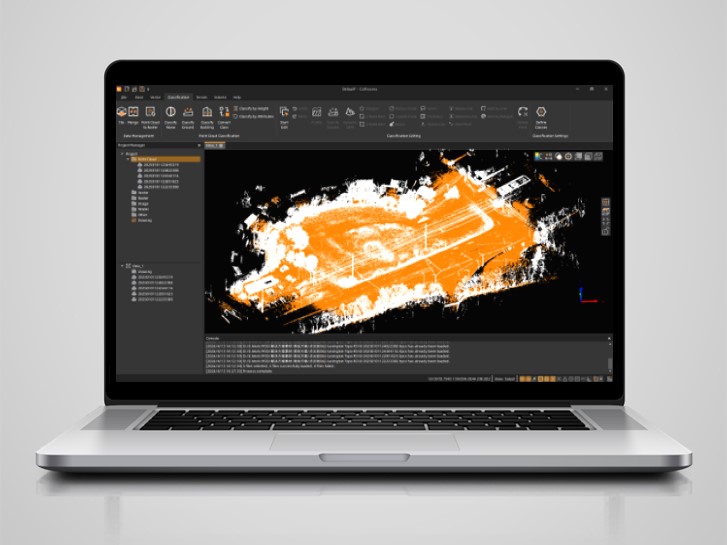
The optimised cloud went into CoProcess. One-click intelligent classification separated ground points from vegetation, buildings and other features. From the ground points, a Digital Elevation Model, contour lines at the required one US-foot intervals, and elevation points were generated. In a familiar CAD-style interface, the surveyor drew vector linework directly on the point cloud, then exported standard DWG and DXF files that opened natively in AutoCAD, ready for his own US-standard templates for line types, symbols, layers and sheet layouts.
Left: Raw RS10 point cloud data displayed in CoProcess software before classification. Right: Ground points classified in the software, preparing the data for terrain modelling and contour generation.
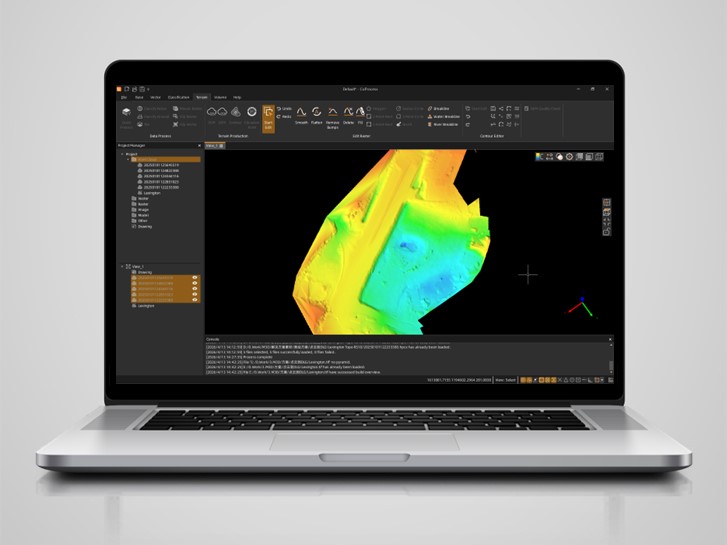
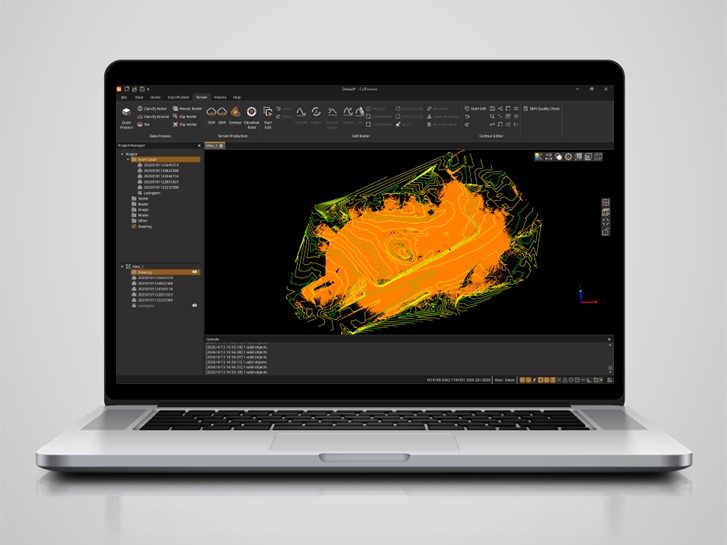
Left: A Digital Elevation Model and contour lines generated in CoProcess software from classified ground data. Right: Vector lines created directly on the processed point cloud using CAD-style tools in CoProcess software.
APIS: A Fixed Solution Straight on the Scanner
One detail tied the workflow together. Through CHCNAV APIS technology, entering the serial number of a CHCNAV GNSS receiver into SmartGo gives the RS10 an instant FIX status, so the point cloud is transformed into the correct coordinate system automatically, with no manual intervention. For projects needing PPK post-processing, the ecosystem reads native HCN static data from CHCNAV base stations directly, removing the friction of converting to third-party RINEX files and the errors that come with manually entering antenna heights and offsets.
The Result: One Day, Five Times Faster, No Conversions
The Lexington survey was completed roughly five times faster than a traditional GNSS RTK rover workflow, with field-to-map turnaround inside a single day. The one-stop pipeline took raw point clouds to precise DEMs, smooth contours and CAD-ready linework without a single third-party conversion, and the deliverable met US mapping standards out of CoProcess with only minor touch-ups. Because the software carries minimal learning curve and works directly with CHCNAV GNSS hardware, the approach also cut the labour cost of the job substantially.
Final DWG/DXF topographic map exported from CoProcess with native AutoCAD compatibility, ready for US-standard survey deliverables.
The workflow from RS10 SLAM scanning to vector drawing in CoProcess is incredibly efficient. What really stands out is the APIS feature, it lets us get a fixed RTK solution directly on the SLAM device, so we easily obtain point cloud data with a proper coordinate system. No guesswork, no post-processing headaches. The whole ecosystem, from field acquisition to final linework, is extremely friendly for topographic mapping. It saves time, reduces complexity, and just works.
For survey teams weighing how to handle large topographic sites where drones are grounded and point-by-point work is too slow, the Lexington project is a clear data point: a handheld SLAM scanner backed by a connected, one-stop software ecosystem can deliver professional, standards-compliant mapping in a fraction of the time. The RS10 sits within the CHCNAV 3D mobile mapping and surveying and engineering solutions, alongside the RS7 handheld scanner for indoor and feature-poor environments.
____
About CHC Navigation
CHC Navigation (CHCNAV) develops advanced mapping, navigation, and positioning solutions designed to increase productivity and efficiency. Serving industries such as geospatial, agriculture, machine control and autonomy, CHCNAV delivers innovative technologies that empower professionals and drive industry advancement. With a global presence spanning over 140 countries and a team of more than 2,200 professionals, CHC Navigation is recognized as a leader in the geospatial industry and beyond. For more information about CHC Navigation [Huace:300627.SZ], please visit: https://geospatial.chcnav.com/about/overview
Have a question about our mobile mapping solutions?