専門の測量士は、広大な地形測量現場において、お馴染みのトレードオフに直面します。従来のGNSS RTKローバーは高精度ですが処理速度が遅く、広大な現場では、ポイントごとに歩いて測量するだけで数日かかることがよくあります。ドローン測量なら開けた場所では高速ですが、飛行禁止区域では使用できず、樹冠の下では測定が困難で、ドローンの真下の地面を捉えることもできません。 ケンタッキー州レキシントンで最近実施された60,000m²のプロジェクトでは、これら2つの制約が同時に問題となりました。 iGage Mapping Corporationは、CHCNAV RS10 SLAMスキャナーとCHCNAVソフトウェアエコシステムを用いてこの業務を実施し、約30分で現地測量を完了させ、その日のうちに実用可能な地形図を納品しました。
プロジェクト:ドローンが飛行できない地域での60,000 m²に及ぶ調査
ケンタッキー州の公認土地測量士であり、iGageに所属するマシュー・シボール氏は、レキシントンにある14.8エーカーの敷地について、包括的な地形測量を実施する必要がありました。この案件の要件は、以下の3つの点で同時に厳しいものでした:
- 専門的な成果物:建物、道路、植生、マンホールのベクター線画、1米フィート間隔の等高線、および標高グリッド。これらはすべて、測定精度1米フィート以内の精度で作成すること。
- 飛行禁止区域:敷地は制限空域内に位置しており、ドローンによる航空測量が許可されていなかったため、ほとんどのチームが選択するであろう迅速な手法は選択肢から外れていました。
- 厳しいスケジュール:クライアントは24時間以内に測量級の結果を必要としていた。
ポイントごとのGNSS RTKローバーなら精度は確保できたが、納期には間に合わなかった。ドローンなら納期には間に合ったかもしれないが、飛行が許可されていなかった。この仕事には、測位精度を犠牲にすることなく、徒歩で迅速に地上の詳細を捉えることができる手法が求められていた。
![現場作業員が、RS10 SLAMスキャナーを使用して地形測量データを取得しています。]() RS10は、作業者が現場を歩きながら連続的な点群データを取得するため、航空測量や一点ごとの測定を行わなくても、測量級の高精度な地形データを効率的に収集することができます。
RS10は、作業者が現場を歩きながら連続的な点群データを取得するため、航空測量や一点ごとの測定を行わなくても、測量級の高精度な地形データを効率的に収集することができます。
この現場で、なぜSLAMがRTKローバーやドローンに勝ったのか
一般的なGNSS受信機は、一度に1点ずつ記録します。一方、CHCNAV RS10は、オペレーターが歩行しながら高密度な点群データを連続的に取得し、RTK、LiDAR、ビジュアルSLAMを「ディープフュージョン」で統合します。 この融合技術こそが、ドローンや通常のGNSSローバーでは不可能な状況――樹冠の下、空が見えない都市のキャニオン、そして本プロジェクトの定義となったような飛行禁止区域内――においても、絶対的な精度を維持することを可能にしています。RTKがSLAMの軌跡を制約するため、オペレーターはデータの整合性を保つためにループを閉じるように歩く必要がありません。
| 因子 |
GNSS受信機 |
UAV用LiDAR |
SLAMスキャナー(RS10 + CoProcess) |
| 現地データ取得 |
処理が遅く、一点ずつ;遮蔽物の下ではデータに欠落が生じる |
高速な空中スキャン |
歩行速度での高速スキャン |
| 動作環境 |
完全な晴天時のみ |
空が開放されていること。飛行禁止区域によって遮られている場合 |
屋内、屋外、樹冠下、都市のキャニオン |
| 位置精度 |
最高(絶対値でセンチメートル単位) |
中程度~高精度(高度によって異なる) |
高(センチメートルレベル、RTKによる制約付きSLAM) |
| 投資レベル |
$ |
$$$$ |
$$ |
制限のない開放的な場所であれば、ドローンが依然として最も迅速なツールとなるでしょう。しかし、樹冠や障害物、あるいは飛行禁止区域が絡んでくると、測量グレードの精度で作業を完了できるのは、徒歩によるSLAMワークフローのみとなります。
「ワンストップ・ワークフロー:現場から完成まで」
このプロジェクトにおけるRS10の強みは、スキャナーそのものだけでなく、現場での補正から最終的なCAD図面作成に至るまで、一連の作業フロー全体が単一のエコシステム内で完結し、その間にサードパーティ製のフォーマット変換が一切必要なかった点にあります。作業は3つの段階に分けて行われました。
ステップA:フィールドデータの取得
既知の地点上に基地局を設置し、リアルタイム補正を行うためのローカルCORSサービスを利用可能にした。RS10をSmartGoモバイルアプリに接続し、RTKによる固定測位ソリューションを用いて、オペレーターが60,000m²の敷地全体を歩き回った。 RTKとSLAMのディープフュージョンにより、ループ閉鎖を必要とすることなく、全行程を通じて絶対精度が維持されました。現場でのデータ取得には約30分かかりました。
ステップ B:データの最適化
スキャンデータはCoPreにインポートされ、ワンクリックでSLAMの後処理が実行され、クリーンで最適化された点群が生成されました。CoPreは、業界標準のLAS、LAZ、E57形式に加え、中間変換の手順を必要とせずにAutoCADで直接開くことができるRCP(Recap)形式もエクスポートします。
手順 C:オフィス内での作図
最適化された点群データはCoProcessに取り込まれました。ワンクリックのインテリジェント分類により、地表点が植生、建物、その他の地物から分離されました。地表点をもとに、デジタル標高モデル(DEM)、指定された1米フィート間隔の等高線、および標高点が生成されました。 使い慣れたCADスタイルのインターフェースで、測量士は点群上に直接ベクトル線画を描画し、AutoCADでネイティブに開く標準のDWGおよびDXFファイルをエクスポートしました。これにより、線種、シンボル、レイヤー、シートレイアウトについて、自身が使用する米国標準のテンプレートをすぐに適用できるようになりました。
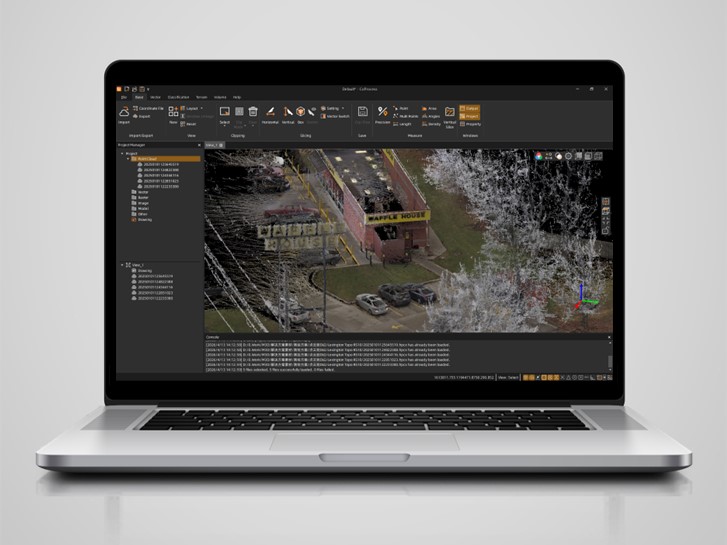
![CHCNAV CoProcess ソフトウェア内の生ポイントクラウドデータ]()
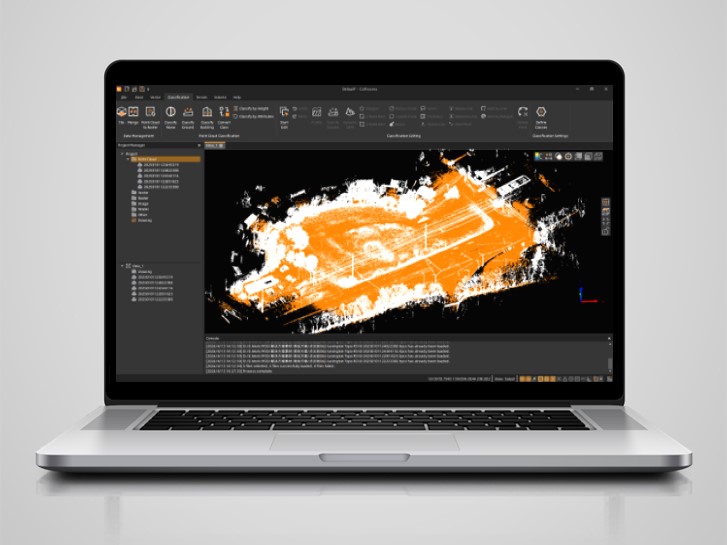
![CHCNAV CoProcess ソフトウェア内の生ポイントクラウドデータ]() 左:分類処理を行う前に、CoProcessソフトウェアで表示されたRS10の生点群データ。右:ソフトウェアで分類された地上点。地形モデリングおよび等高線生成に向けたデータ準備が行われている。
左:分類処理を行う前に、CoProcessソフトウェアで表示されたRS10の生点群データ。右:ソフトウェアで分類された地上点。地形モデリングおよび等高線生成に向けたデータ準備が行われている。
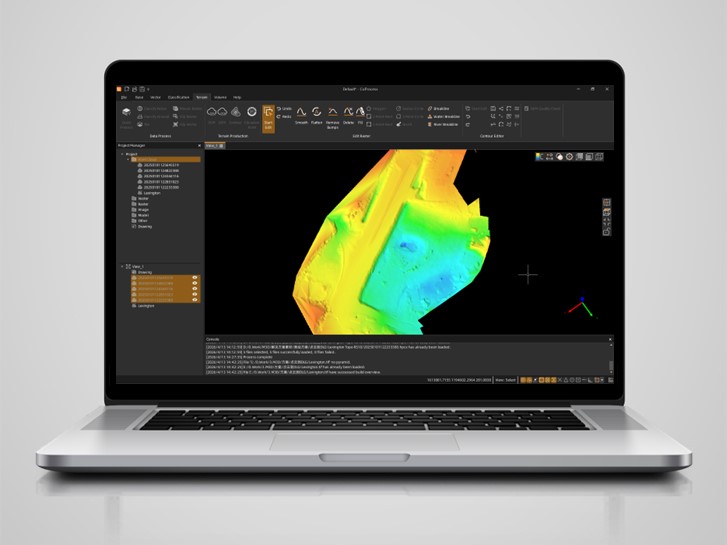
![CoProcess におけるDEMおよび等高線の生成]()
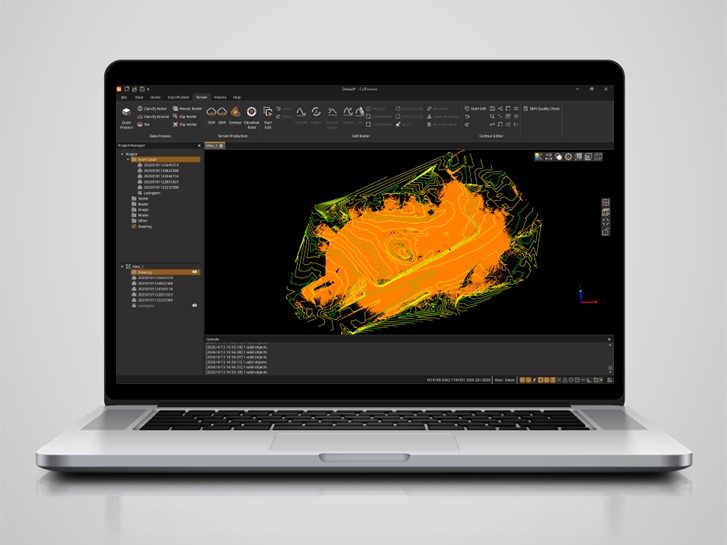
![CoProcess におけるDEMおよび等高線の生成]() 左:CoProcessソフトウェアで、分類済みの地上データから生成されたデジタル標高モデル(DEM)と等高線。右:CoProcessソフトウェアのCAD風ツールを使用して、処理済みの点群データ上に直接作成されたベクトル線。
左:CoProcessソフトウェアで、分類済みの地上データから生成されたデジタル標高モデル(DEM)と等高線。右:CoProcessソフトウェアのCAD風ツールを使用して、処理済みの点群データ上に直接作成されたベクトル線。
APIS:スキャナーに直接設置する固定式ソリューション
ある細部が、このワークフローを一体化させていました。CHCNAV APIS テクノロジーにより、CHCNAV GNSS レシーバーのシリアル番号を SmartGo に入力するだけで、RS10 は即座に FIX ステータスを取得します。これにより、手動での操作を一切必要とせずに、点群データが自動的に正しい座標系に変換されます。 PPK後処理を必要とするプロジェクトでは、このエコシステムがCHCNAV基地局からネイティブのHCN静的データを直接読み取るため、サードパーティ製のRINEXファイルへの変換に伴う手間や、アンテナの高さやオフセットを手動で入力する際に生じるエラーが排除されます。
結果:1日で5倍のスピード、コンバージョンはゼロ
Lexingtonによる測量作業は、従来のGNSS RTKローバーによるワークフローに比べて約5倍の速さで完了し、現地調査から地図作成までの所要時間は1日以内に収まりました。 このワンストップのパイプラインにより、生データである点群から、サードパーティ製の変換ツールを一切使用することなく、高精度なDEM、滑らかな等高線、CAD対応の線画が生成され、CoProcessから出力された成果物は、わずかな手直しだけで米国の測量基準を満たしました。 このソフトウェアは習得が容易で、CHCNAVのGNSSハードウェアと直接連携するため、このアプローチにより、作業の人件費も大幅に削減されました。
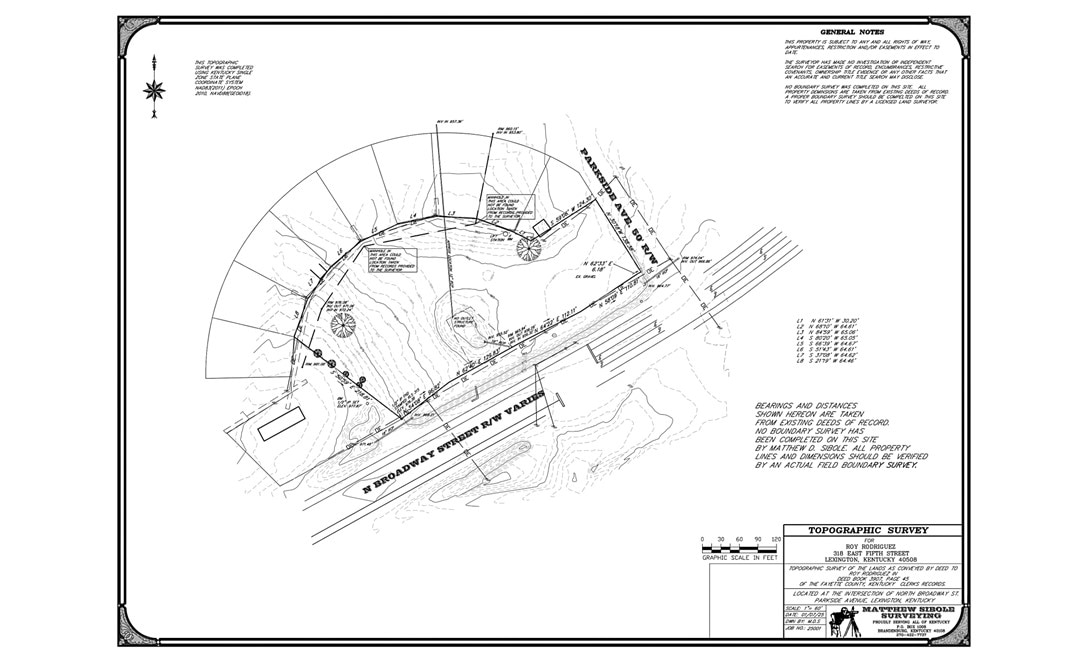
![CHCNAV CoProcessによる最終的なDWG/DXF形式の地形測量成果物]() CoProcessからエクスポートされた最終的なDWG/DXF形式の地形図は、AutoCADとネイティブ互換性があり、米国規格の測量成果物としてすぐに利用可能です。
CoProcessからエクスポートされた最終的なDWG/DXF形式の地形図は、AutoCADとネイティブ互換性があり、米国規格の測量成果物としてすぐに利用可能です。
RS10によるSLAMスキャンからCoProcessでのベクトル作図に至るワークフローは、驚くほど効率的です。特に際立っているのがAPIS機能で、これによりSLAMデバイス上で直接固定RTK測位ソリューションを取得できるため、適切な座標系を持つ点群データを容易に入手できます。 推測作業も、後処理の煩わしさもありません。現地でのデータ取得から最終的な線画作成に至るまでのエコシステム全体が、地形測量に極めて適しています。時間を節約し、複雑さを軽減し、ただ確実に機能します。
iGage Mapping Corporation
| RS10の概要 |
仕様 |
| センサーフュージョン |
RTK、LiDAR、ビジュアルSLAMのディープフュージョン |
| 絶対精度 |
水平・垂直方向ともに5 cm未満 |
| 相対精度 |
1 cm未満 |
| LiDAR測定範囲 |
120 m(16チャンネル)または300 m(32チャンネル) |
| 測位 |
RTK対応のフルGNSS |
| ソフトウェアエコシステム |
SmartGo、CoPre、CoProcess |
ケーススタディの全文をダウンロード(PDF)
ドローンの使用が制限され、一点ずつ手作業で行うには時間がかかりすぎる大規模な地形調査現場への対応策を検討している測量チームにとって、レキシントン・プロジェクトは明確な実例となります。つまり、連携されたワンストップのソフトウェア・エコシステムに支えられたハンドヘルド型SLAMスキャナーを用いれば、従来の数分の1の時間で、専門的かつ規格に準拠したマッピングを実現できるのです。 RS10は、屋内や地物が少ない環境向けのハンドヘルドスキャナー「RS7」と並んで、CHCNAVの3Dモバイルマッピング、測量、エンジニアリングソリューションの一角を担っています。
____
CHC Navigationについて
CHC Navigation(CHCNAV)は、生産性と効率の向上を目的とした、高度なマッピング、ナビゲーション、測位ソリューションを開発しています。 地理空間、農業、機械制御、自律走行などの業界にサービスを提供するCHCNAVは、専門家の能力を高め、業界の発展を牽引する革新的な技術を提供しています。140カ国以上に拠点を展開し、2,200名以上の専門家からなるチームを擁するCHC Navigationは、地理空間業界をはじめとする幅広い分野において、リーダーとして認められています。 CHC Navigation [Huace:300627.SZ] に関する詳細については、https://geospatial.chcnav.com/about/overviewをご覧ください。