Cartografía topográfica integral en una zona de exclusión aérea con el CHCNAV RS10
2026-06-25
Los topógrafos profesionales se enfrentan a una disyuntiva habitual en los grandes terrenos topográficos. Un rover GNSS RTK tradicional es preciso, pero lento, lo que a menudo convierte un terreno extenso en días de recorrido a pie punto por punto. La cartografía con drones es rápida en espacios abiertos, pero se detiene en las zonas de exclusión aérea, tiene dificultades bajo el dosel arbóreo y no puede ver el suelo que hay debajo. En un proyecto reciente de 60 000m² en Lexington, Kentucky, ambas limitaciones se dieron a la vez. iGage Mapping Corporation llevó a cabo el trabajo con el escáner CHCNAV RS10 SLAM y el ecosistema de software CHCNAV, y completó la adquisición de datos sobre el terreno en aproximadamente media hora, entregando ese mismo día un mapa topográfico listo para su uso.
El proyecto: un levantamiento topográfico de 60 000 m² en el que los drones no podían volar
Matthew Sibole, un topógrafo colegiado en Kentucky que colabora con iGage, tenía que realizar un levantamiento topográfico completo de un terreno de 14,8 acres en Lexington. El encargo planteaba tres retos a la vez:
Resultados profesionales: dibujos vectoriales de edificios, carreteras, vegetación y bocas de inspección; curvas de nivel con intervalos de un pie estadounidense; y cuadrículas altimétricas, todo ello con una precisión de medición de un pie estadounidense.
Zona de exclusión aérea: el terreno se encontraba dentro de un espacio aéreo restringido en el que no se permitían los levantamientos con drones, lo que descartaba la opción más rápida a la que recurrirían la mayoría de los equipos.
Un plazo muy ajustado: el cliente necesitaba resultados con calidad topográfica en un plazo de 24 horas.
Un rover GNSS RTK punto por punto podría haber alcanzado la precisión necesaria, pero no habría cumplido el plazo. Los drones podrían haber cumplido el plazo, pero no se permitía su vuelo. El trabajo requería un método que capturara los detalles del terreno rápidamente, a pie, sin renunciar a la precisión de posicionamiento.
El RS10 captura una nube de puntos continua mientras el operador recorre el terreno, lo que permite una recopilación eficiente de datos topográficos con precisión de topografía sin necesidad de cartografía aérea ni mediciones punto por punto.
Por qué el sistema SLAM superó al rover RTK y a los drones en este emplazamiento
Un receptor GNSS estándar registra un punto cada vez. El CHCNAV RS10, en cambio, captura de forma continua una densa nube de puntos mientras el operador camina, combinando RTK, LiDAR y SLAM visual en una fusión profunda. Esa fusión es lo que le permite mantener una precisión absoluta allí donde un dron o un rover GNSS sin más fallaría: bajo el dosel de los árboles, en cañones urbanos con el cielo obstruido y dentro del tipo de zona de exclusión aérea que definió este proyecto. Dado que el RTK limita la trayectoria del SLAM, el operador no necesita recorrer circuitos cerrados para mantener los datos alineados.
Factor
Receptor GNSS
LiDAR para UAV
Escáner SLAM (RS10 + CoProcess)
Adquisición sobre el terreno
Lenta, punto por punto; lagunas en zonas con cobertura vegetal
Cobertura aérea rápida
Escaneo rápido a velocidad de marcha
Entorno operativo
Solo a cielo abierto
A cielo abierto; bloqueado por zonas de exclusión aérea
Interior, exterior, bajo dosel, cañones urbanos
Precisión posicional
Máxima (centímetros absolutos)
De moderada a alta (varía con la altitud)
Alta (a nivel de centímetros, SLAM con restricción RTK)
Nivel de inversión
$
$$$$
$$
En un terreno abierto y sin restricciones, un dron puede seguir siendo la herramienta más rápida. Sin embargo, en cuanto aparecen el dosel arbóreo, obstáculos o una zona de exclusión aérea, el flujo de trabajo SLAM a pie es el único que permite completar el trabajo con precisión topográfica.
El flujo de trabajo integral, desde el campo hasta el producto final
El punto fuerte del RS10 en este proyecto no fue solo el escáner, sino el hecho de que todo el proceso se desarrollara dentro de un único ecosistema, desde la corrección sobre el terreno hasta el dibujo CAD final, sin necesidad de conversiones de formato de terceros entre medias. El trabajo se llevó a cabo en tres fases.
Paso A: Adquisición de datos sobre el terreno
Se instaló una estación base sobre un punto conocido, con un servicio CORS local disponible para correcciones en tiempo real. El RS10 se conectó a la aplicación móvil SmartGo y, con una solución RTK fija, el operador recorrió a pie la totalidad del emplazamientode 60 000m². La fusión profunda de RTK y SLAM mantuvo una precisión absoluta en todo momento sin necesidad de cerrar bucles. La captura sobre el terreno duró aproximadamente 30 minutos.
Paso B: Optimización de datos
El escaneo sin procesar se importó a CoPre, donde con un solo clic se ejecutó el posprocesamiento SLAM completo y se generó una nube de puntos limpia y optimizada. CoPre exporta los formatos estándar del sector LAS, LAZ y E57, así como el formato RCP (Recap), que se abre directamente en AutoCAD sin necesidad de conversión previa.
Paso C: Trazado en la consulta
La nube optimizada se importó a CoProcess. La clasificación inteligente con un solo clic separó los puntos del terreno de la vegetación, los edificios y otros elementos. A partir de los puntos del terreno, se generaron un modelo digital de elevación, curvas de nivel con los intervalos requeridos de un pie estadounidense y puntos de cota. En una interfaz familiar al estilo CAD, el topógrafo dibujó líneas vectoriales directamente sobre la nube de puntos y, a continuación, exportó archivos DWG y DXF estándar que se abrieron de forma nativa en AutoCAD, listos para aplicar sus propias plantillas según los estándares estadounidenses en cuanto a tipos de línea, símbolos, capas y diseños de hoja.
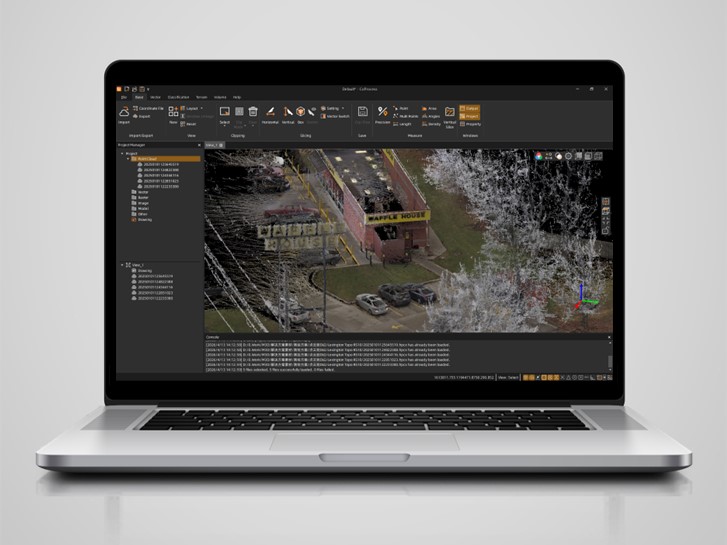
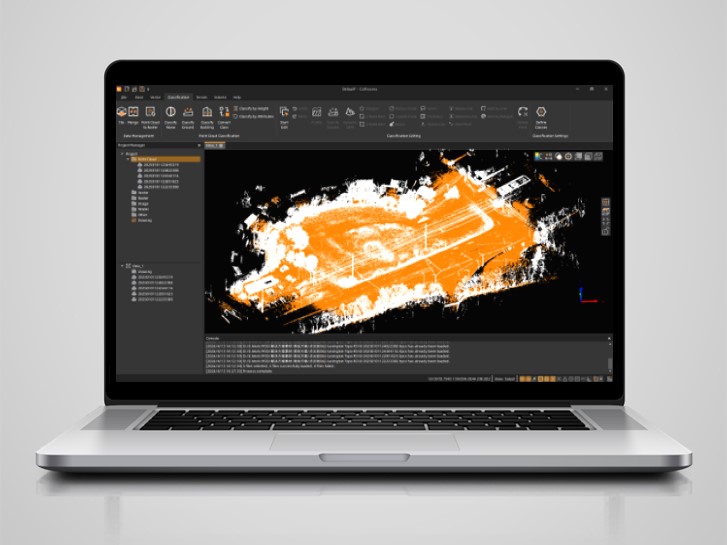
Izquierda: Datos brutos de la nube de puntos del RS10 visualizados en el software CoProcess antes de la clasificación. Derecha: Puntos del terreno clasificados en el software, preparando los datos para la modelización del terreno y la generación de curvas de nivel.
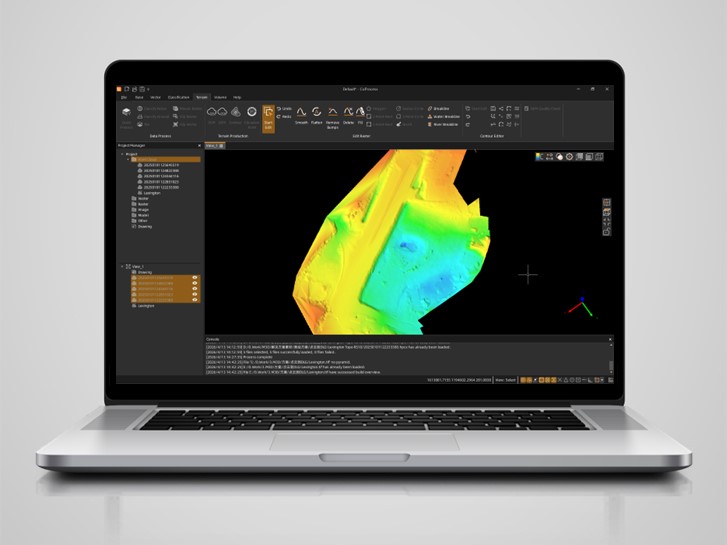
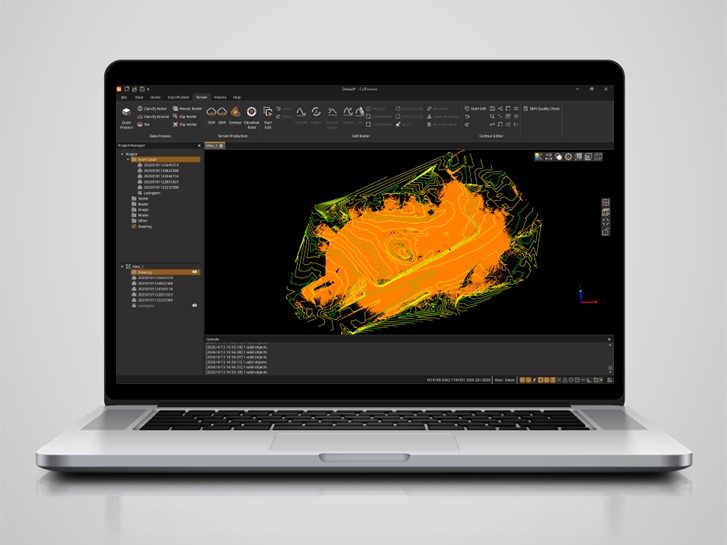
Izquierda: Un modelo digital de elevación y curvas de nivel generadas en el software CoProcess a partir de datos topográficos clasificados. Derecha: Líneas vectoriales creadas directamente sobre la nube de puntos procesada utilizando herramientas de tipo CAD en el software CoProcess.
APIS: una solución fija directamente en el escáner
Hubo un detalle que unificó todo el flujo de trabajo. Gracias a la tecnología CHCNAV APIS, al introducir el número de serie de un receptor GNSS CHCNAV en SmartGo, el RS10 obtiene al instante el estado «FIX», de modo que la nube de puntos se transforma automáticamente al sistema de coordenadas correcto, sin necesidad de intervención manual. En el caso de los proyectos que requieren un posprocesamiento PPK, el ecosistema lee directamente los datos estáticos HCN nativos de las estaciones base de CHCNAV, lo que elimina las dificultades que supone la conversión a archivos RINEX de terceros y los errores derivados de la introducción manual de las alturas y desplazamientos de las antenas.
El resultado: un día, cinco veces más rápido, sin conversiones
El levantamiento de Lexington se completó aproximadamente cinco veces más rápido que un flujo de trabajo tradicional con un rover GNSS RTK, con un plazo de entrega desde el terreno hasta el mapa de tan solo un día. El proceso integral transformó las nubes de puntos sin procesar en modelos digitales de elevación (DEM) precisos, curvas de nivel suavizadas y trazados listos para CAD sin necesidad de ninguna conversión por parte de terceros, y el resultado final cumplió con las normas cartográficas estadounidenses directamente desde CoProcess, con solo unos pequeños retoques. Dado que el software tiene una curva de aprendizaje mínima y funciona directamente con el hardware GNSS de CHCNAV, este enfoque también redujo sustancialmente los costes de mano de obra del proyecto.
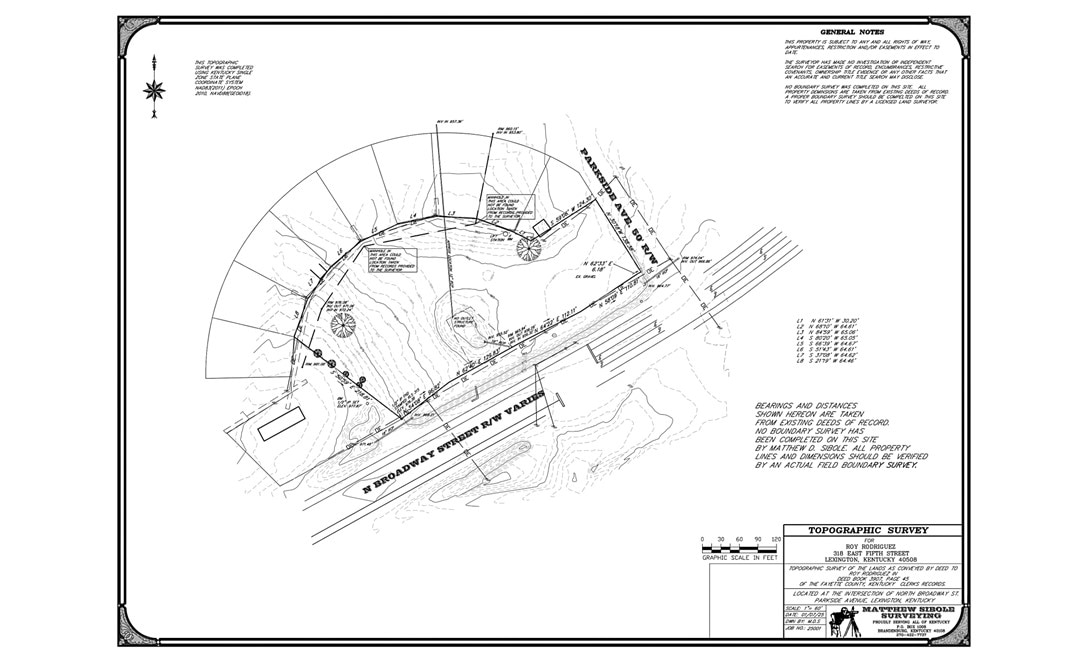
Mapa topográfico final en formato DWG/DXF exportado desde CoProcess con compatibilidad nativa con AutoCAD, listo para su presentación según los estándares topográficos de EE. UU.
El flujo de trabajo, desde el escaneo SLAM con el RS10 hasta el dibujo vectorial en CoProcess, es increíblemente eficiente. Lo que realmente destaca es la función APIS, que nos permite obtener una solución RTK fija directamente en el dispositivo SLAM, por lo que conseguimos fácilmente datos de nube de puntos con un sistema de coordenadas adecuado. Sin conjeturas, sin quebraderos de cabeza en el posprocesamiento. Todo el ecosistema, desde la adquisición sobre el terreno hasta el trazado final, resulta extremadamente sencillo de usar para la cartografía topográfica. Ahorra tiempo, reduce la complejidad y simplemente funciona.
Para los equipos de topografía que se plantean cómo abordar grandes emplazamientos topográficos en los que no se pueden utilizar drones y el trabajo punto por punto resulta demasiado lento, el proyecto de Lexington constituye un claro ejemplo: un escáner SLAM portátil, respaldado por un ecosistema de software conectado y integral, puede ofrecer cartografía profesional y conforme a las normas en una fracción del tiempo. El RS10 forma parte de las soluciones de cartografía móvil, topografía e ingeniería en 3D de CHCNAV, junto con el escáner portátil RS7, diseñado para entornos interiores y con pocos elementos de referencia.
____
Acerca de CHC Navigation
CHC Navigation (CHCNAV) desarrolla soluciones avanzadas de cartografía, navegación y posicionamiento diseñadas para aumentar la productividad y la eficiencia. CHCNAV, que presta servicio a sectores como el geoespacial, la agricultura, el control de maquinaria y la autonomía, ofrece tecnologías innovadoras que potencian el trabajo de los profesionales e impulsan el avance del sector. Con una presencia global que abarca más de 140 países y un equipo de más de 2.200 profesionales, CHC Navigation es reconocida como líder en el sector geoespacial y más allá. Para obtener más información sobre CHC Navigation [Huace:300627.SZ], visite: https://geospatial.chcnav.com/about/overview
¿Tienes alguna pregunta sobre nuestras soluciones de cartografía móvil?