Topografische Kartierung aus einer Hand in einer Flugverbotszone mit dem CHCNAV RS10
2026-06-25
Professionelle Vermessungsingenieure stehen bei großen topografischen Vermessungsobjekten vor einem bekannten Zielkonflikt. Ein herkömmlicher GNSS-RTK-Rover ist zwar genau, aber langsam, sodass die Vermessung eines großen Geländes oft tagelanges Punkt-für-Punkt-Gehen erfordert. Die Kartierung per Drohne ist im offenen Gelände schnell, stößt jedoch an Flugverbotszonen an, hat unter Baumkronen Schwierigkeiten und kann den Boden unter sich nicht erfassen. Bei einem kürzlich durchgeführten 60.000m² großen Projekt in Lexington, Kentucky, kamen beide Einschränkungen gleichzeitig zum Tragen. Die iGage Mapping Corporation führte den Auftrag mit dem CHCNAV RS10 SLAM-Scanner und dem CHCNAV-Software-Ökosystem durch und schloss die Feldaufnahme in etwa einer halben Stunde ab, wobei noch am selben Tag eine produktionsreife topografische Karte geliefert wurde.
Das Projekt: Eine Vermessung auf einer Fläche von 60.000 m², auf der Drohnen nicht fliegen konnten
Matthew Sibole, ein in Kentucky zugelassener Vermessungsingenieur, der mit iGage arbeitet, sollte eine vollständige topografische Vermessung eines 14,8 Acre großen Geländes in Lexington durchführen. Der Auftrag stellte gleich in dreierlei Hinsicht hohe Anforderungen:
Fachliche Anforderungen: Vektor-Strichzeichnungen von Gebäuden, Straßen, Vegetation und Schächten, Höhenlinien im Abstand von einem US-Fuß sowie Höhenraster – alles mit einer Messgenauigkeit von maximal einem US-Fuß.
Eine Flugverbotszone: Das Gelände befand sich in einem gesperrten Luftraum, in dem Vermessungen mit Drohnen nicht erlaubt waren, was die schnelle Option ausschloss, auf die die meisten Teams zurückgreifen würden.
Ein enger Zeitplan: Der Kunde benötigte vermessungsgenaue Ergebnisse innerhalb von 24 Stunden.
Ein Punkt-für-Punkt-GNSS-RTK-Rover hätte zwar die erforderliche Genauigkeit erreichen können, aber nicht die Frist. Drohnen hätten die Frist einhalten können, durften jedoch nicht fliegen. Der Auftrag erforderte eine Methode, mit der sich Details am Boden schnell und zu Fuß erfassen ließen, ohne dabei auf Positionierungsgenauigkeit zu verzichten.
Das RS10 erfasst eine kontinuierliche Punktwolke, während der Bediener das Gelände abläuft, und ermöglicht so eine effiziente Erfassung topografischer Daten in Vermessungsqualität ohne Luftbildaufnahmen oder Punkt-für-Punkt-Messungen.
Warum SLAM an diesem Standort besser abschnitt als der RTK-Rover und die Drohnen
Ein herkömmlicher GNSS-Empfänger erfasst jeweils nur einen Punkt. Der CHCNAV RS10 hingegen erfasst kontinuierlich eine dichte Punktwolke, während der Bediener geht, und kombiniert dabei RTK, LiDAR und visuelles SLAM in einer „Deep Fusion“. Genau diese Fusion ermöglicht es ihm, absolute Genauigkeit zu gewährleisten, wo eine Drohne oder ein reiner GNSS-Rover versagen würde: unter Baumkronen, in städtischen Schluchten mit eingeschränkter Sicht zum Himmel und innerhalb der Art von Flugverbotszone, die dieses Projekt geprägt hat. Da RTK die SLAM-Trajektorie einschränkt, muss der Bediener keine geschlossenen Schleifen laufen, um die Daten aufeinander abzustimmen.
Faktor
GNSS-Empfänger
UAV-LiDAR
SLAM-Scanner (RS10 + CoProcess)
Datenerfassung vor Ort
Langsam, Punkt für Punkt; Lücken unter Bewuchs
Schnelle Erfassung aus der Luft
Schnelles Scannen bei Schrittgeschwindigkeit
Betriebsumgebung
Nur unter freiem Himmel
Unter freiem Himmel; durch Flugverbotszonen blockiert
In Innenräumen, im Freien, unter Baumkronen, in städtischen Schluchten
Positionsgenauigkeit
Höchste (absolut in Zentimetern)
Mäßig bis hoch (variiert je nach Höhe)
Hoch (im Zentimeterbereich, RTK-gestütztes SLAM)
Investitionsaufwand
$
$$$$
$$
In einem offenen Gelände ohne Einschränkungen ist eine Drohne möglicherweise immer noch das schnellste Hilfsmittel. Sobald jedoch Baumkronen, Hindernisse oder eine Flugverbotszone ins Spiel kommen, ist der „Walking-SLAM“-Workflow die Methode, mit der sich die Aufgabe weiterhin in Vermessungsqualität erledigen lässt.
Der Workflow aus einer Hand – vom Feld bis zum fertigen Produkt
Die Stärke des RS10 bei diesem Projekt lag nicht nur im Scanner selbst, sondern auch darin, dass die gesamte Arbeitsablaufkette – von der Korrektur vor Ort bis zur endgültigen CAD-Zeichnung – innerhalb eines einzigen Ökosystems ablief, ohne dass zwischendurch Formatkonvertierungen durch Drittanbieter erforderlich waren. Die Arbeit erfolgte in drei Phasen.
Schritt A: Datenerhebung vor Ort
Über einem bekannten Punkt wurde eine Basisstation eingerichtet, wobei ein lokaler CORS-Dienst für Echtzeitkorrekturen zur Verfügung stand. Das RS10 wurde mit der SmartGo-App verbunden, und mit einer RTK-fixierten Lösung durchlief der Bediener das gesamte 60.000m² große Gelände. Die Kombination aus RTK und SLAM-Deep-Fusion gewährleistete durchgehend absolute Genauigkeit, ohne dass Schleifenschlüsse erforderlich waren. Die Erfassung vor Ort dauerte etwa 30 Minuten.
Schritt B: Datenoptimierung
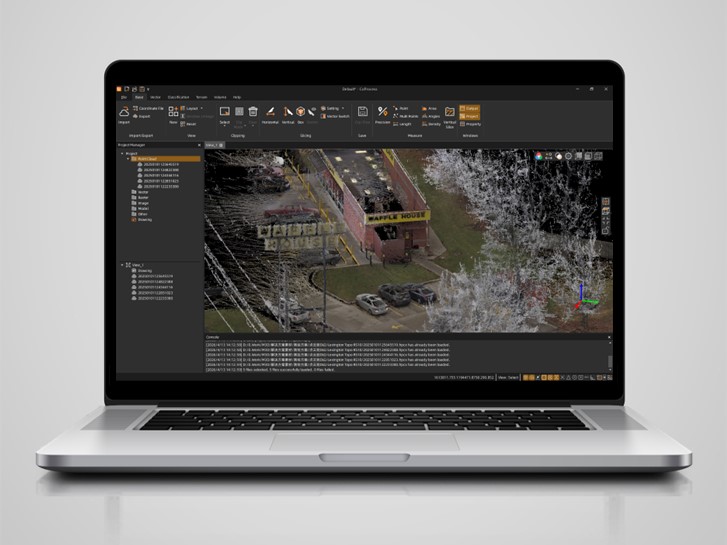
Der Rohscan wurde in CoPre importiert, wo mit einem einzigen Klick die vollständige SLAM-Nachbearbeitung durchgeführt und eine bereinigte, optimierte Punktwolke erzeugt wurde. CoPre exportiert die branchenüblichen Formate LAS, LAZ und E57 sowie das RCP-Format (Recap), das sich ohne zwischengeschalteten Konvertierungsschritt direkt in AutoCAD öffnen lässt.
Schritt C: Zeichnung in der Praxis
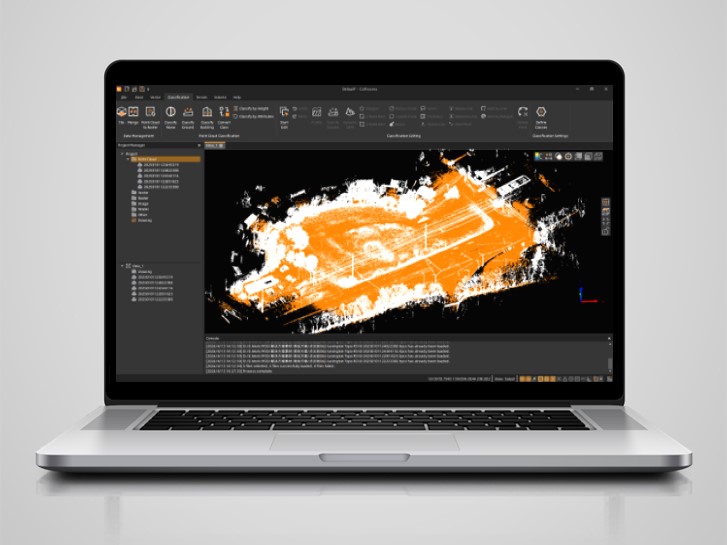
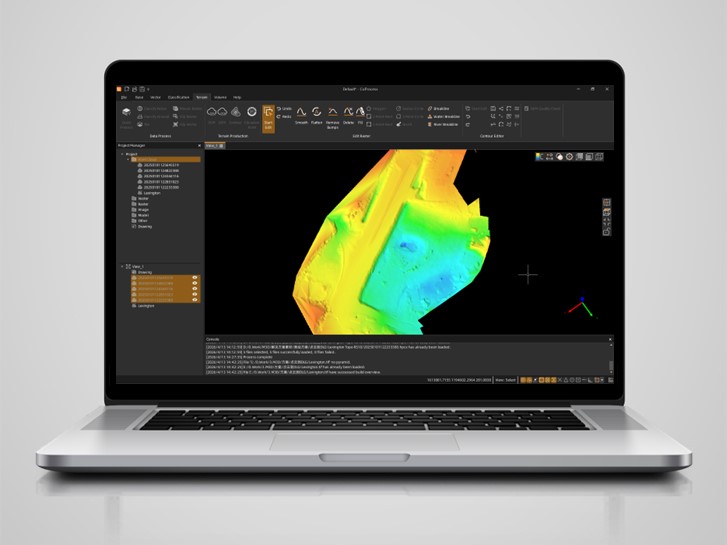
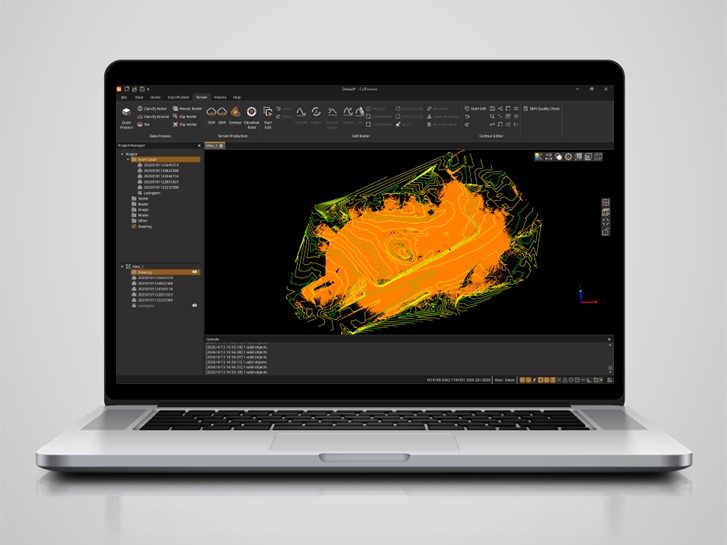
Die optimierte Punktwolke wurde in CoProcess importiert. Durch eine intelligente Klassifizierung mit nur einem Klick wurden Bodenpunkte von Vegetation, Gebäuden und anderen Objekten getrennt. Aus den Bodenpunkten wurden ein digitales Höhenmodell, Höhenlinien im gewünschten Abstand von einem US-Fuß sowie Höhenpunkte generiert. In einer vertrauten CAD-ähnlichen Benutzeroberfläche zeichnete der Vermessungsingenieur Vektorlinien direkt auf die Punktwolke und exportierte anschließend Standard-DWG- und DXF-Dateien, die sich nativ in AutoCAD öffnen ließen und für seine eigenen, dem US-Standard entsprechenden Vorlagen für Linientypen, Symbole, Ebenen und Blattlayouts bereit waren.
Links: Rohdaten der RS10-Punktwolke, dargestellt in der CoProcess-Software vor der Klassifizierung. Rechts: In der Software klassifizierte Bodenpunkte zur Vorbereitung der Daten für die Geländemodellierung und die Erstellung von Höhenlinien.
Links: Ein digitales Höhenmodell und Höhenlinien, die in der CoProcess-Software aus klassifizierten Bodendaten erstellt wurden. Rechts: Vektorlinien, die mithilfe von CAD-ähnlichen Werkzeugen in der CoProcess-Software direkt auf der verarbeiteten Punktwolke erstellt wurden.
APIS: Eine feste Lösung direkt auf dem Scanner
Ein Detail rundete den Arbeitsablauf ab: Dank der CHCNAV-APIS-Technologie erhält der RS10 durch die Eingabe der Seriennummer eines CHCNAV-GNSS-Empfängers in SmartGo sofort den FIX-Status, sodass die Punktwolke automatisch und ohne manuellen Eingriff in das richtige Koordinatensystem transformiert wird. Bei Projekten, die eine PPK-Nachverarbeitung erfordern, liest das Ökosystem native HCN-Statikdaten direkt von den CHCNAV-Basisstationen aus. Dadurch entfallen die Umwandlung in RINEX-Dateien von Drittanbietern sowie die Fehler, die bei der manuellen Eingabe von Antennenhöhen und Offsets entstehen.
Das Ergebnis: Ein Tag, fünfmal schneller, keine Konvertierungen
Die Lexington-Vermessung wurde etwa fünfmal schneller abgeschlossen als bei einem herkömmlichen GNSS-RTK-Rover-Workflow, wobei die Daten innerhalb eines einzigen Tages von der Feldmessung in die Karte übertragen wurden. Die End-to-End-Pipeline wandelte Rohpunktwolken in präzise digitale Geländemodelle (DEMs), geglättete Konturen und CAD-fähige Linienzeichnungen um – ganz ohne Konvertierung durch Drittanbieter –, und das Ergebnis entsprach direkt aus CoProcess heraus den US-Kartierungsstandards und erforderte nur geringfügige Nachbesserungen. Da die Software nur eine minimale Einarbeitungszeit erfordert und direkt mit der CHCNAV-GNSS-Hardware zusammenarbeitet, konnten durch diesen Ansatz auch die Arbeitskosten für den Auftrag erheblich gesenkt werden.
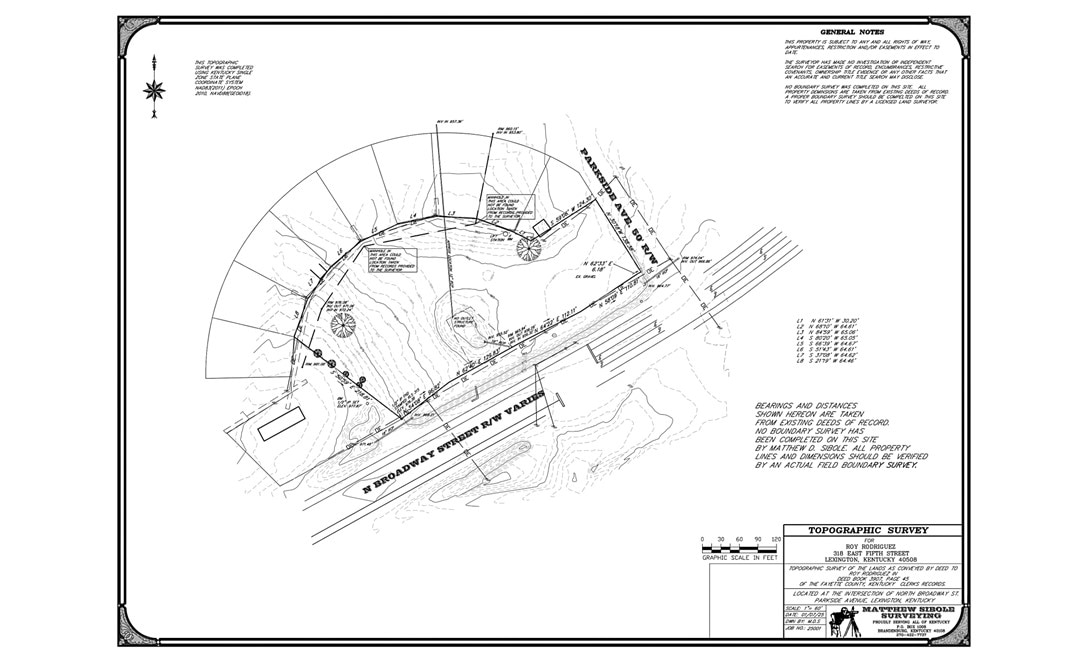
Endgültige topografische DWG/DXF-Karte, exportiert aus CoProcess mit nativer AutoCAD-Kompatibilität, bereit für Vermessungsunterlagen nach US-Standard.
Der Arbeitsablauf vom RS10-SLAM-Scan bis zur Vektorzeichnung in CoProcess ist unglaublich effizient. Besonders hervorzuheben ist die APIS-Funktion: Sie ermöglicht es uns, direkt auf dem SLAM-Gerät eine feste RTK-Lösung zu erhalten, sodass wir problemlos Punktwolkendaten mit einem korrekten Koordinatensystem gewinnen können. Kein Rätselraten, keine Kopfschmerzen bei der Nachbearbeitung. Das gesamte Ökosystem, von der Datenerfassung vor Ort bis zur endgültigen Linienzeichnung, ist äußerst benutzerfreundlich für die topografische Kartierung. Es spart Zeit, reduziert die Komplexität und funktioniert einfach.
iGage Mapping Corporation
RS10 auf einen Blick
Technische Daten
Sensorfusion
RTK, LiDAR und visuelle SLAM – Deep Fusion
Absolute Genauigkeit
Besser als 5 cm in horizontaler und vertikaler Richtung
Für Vermessungsteams, die überlegen, wie sie mit großen topografischen Gebieten umgehen sollen, in denen der Einsatz von Drohnen nicht möglich ist und eine Punkt-für-Punkt-Vermessung zu langsam ist, liefert das Lexington-Projekt einen klaren Anhaltspunkt: Ein handgeführter SLAM-Scanner, unterstützt durch ein vernetztes Software-Ökosystem aus einer Hand, kann professionelle, normkonforme Kartierungen in einem Bruchteil der Zeit liefern. Der RS10 ist Teil der mobilen 3D-Kartierungs-, Vermessungs- und Ingenieurlösungen von CHCNAV und ergänzt den Hand-Scanner RS7 für Innenräume und Umgebungen mit wenigen Orientierungspunkten.
____
Über CHC Navigation
CHC Navigation (CHCNAV) entwickelt fortschrittliche Lösungen für Kartografie, Navigation und Ortung, die darauf ausgelegt sind, Produktivität und Effizienz zu steigern. CHCNAV bedient Branchen wie Geodaten, Landwirtschaft, Maschinensteuerung und autonome Systeme und liefert innovative Technologien, die Fachleute unterstützen und den Fortschritt der Branche vorantreiben. Mit einer globalen Präsenz in über 140 Ländern und einem Team von mehr als 2.200 Fachkräften gilt CHC Navigation als führendes Unternehmen in der Geodatenbranche und darüber hinaus. Weitere Informationen zu CHC Navigation [Huace:300627.SZ] finden Sie unter: https://geospatial.chcnav.com/about/overview
Haben Sie eine Frage zu unseren Lösungen für die mobile Kartierung?