Cartographie topographique en une seule étape dans une zone d'exclusion aérienne grâce au CHCNAV RS10
2026-06-25
Les géomètres professionnels sont confrontés à un dilemme classique sur les grands sites topographiques. Un mobile GNSS RTK traditionnel est précis mais lent, ce qui transforme souvent un grand site en plusieurs jours de marche pour relever chaque point. La cartographie par drone est rapide en terrain dégagé, mais elle s'arrête aux zones d'exclusion aérienne, peine sous le couvert forestier et ne permet pas de voir le sol en dessous. Lors d’un récent projet de 60 000m² à Lexington, dans le Kentucky, ces deux limites se sont présentées simultanément. iGage Mapping Corporation a mené à bien cette mission à l’aide du scanner SLAM CHCNAV RS10 et de l’écosystème logiciel CHCNAV, et a achevé l’acquisition sur le terrain en environ une demi-heure, avec une carte topographique prête à l’emploi livrée le jour même.
Le projet : un levé topographique de 60 000 m² dans une zone d'exclusion pour les drones
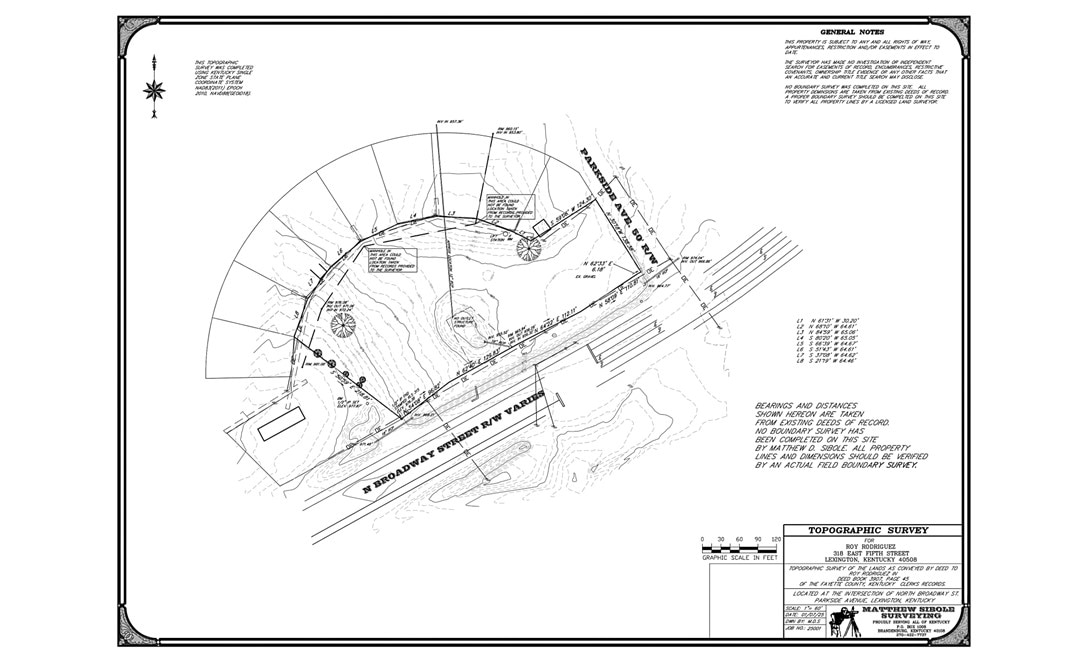
Matthew Sibole, géomètre agréé dans le Kentucky travaillant pour iGage, devait réaliser un levé topographique complet d'un site de 14,8 acres à Lexington. Le cahier des charges était exigeant sur trois fronts à la fois :
Résultats professionnels attendus : des dessins vectoriels des bâtiments, des routes, de la végétation et des regards, des courbes de niveau espacées d’un pied américain, ainsi que des grilles altimétriques, le tout avec une précision de mesure de l’ordre d’un pied américain.
Une zone d’exclusion aérienne : le site se trouvait dans un espace aérien réglementé où les levés par drone n’étaient pas autorisés, ce qui excluait l’option rapide vers laquelle la plupart des équipes se seraient tournées.
Un calendrier serré : le client avait besoin de résultats de qualité topographique dans les 24 heures.
Un mobile GNSS RTK effectuant des relevés point par point aurait pu garantir la précision requise, mais pas le respect du délai. Les drones auraient pu respecter le délai, mais le survol du site était interdit. La mission exigeait une méthode permettant de saisir rapidement les détails au sol, à pied, sans pour autant sacrifier la précision de positionnement.
Le RS10 enregistre un nuage de points en continu tandis que l'opérateur parcourt le site, ce qui permet une collecte efficace de données géospatiale de qualité topographique sans recourir à la cartographie aérienne ni à des mesures point par point.
Pourquoi la technologie SLAM a surpassé les récepteurs RTK et les drones sur ce site
Un récepteur GNSS standard enregistre un point à la fois. Le CHCNAV RS10, quant à lui, capture en continu un nuage de points dense pendant que l’opérateur se déplace, en combinant les technologies RTK, LiDAR et SLAM visuel dans une fusion étroite. C’est cette fusion qui lui permet de conserver une précision absolue là où un drone ou un mobile GNSS seul échouerait : sous le couvert forestier, dans les canyons urbains où le ciel est obstrué, et à l’intérieur d'une zone d’exclusion aérienne qui caractérisait ce projet. Comme le RTK contraint la trajectoire du SLAM, l’opérateur n’a pas besoin d'effectuer de fermeture de boucles pour maintenir l’alignement des données.
Facteur
Récepteur GNSS
LiDAR pour drone
Scanner SLAM (RS10 + CoProcess)
Acquisition sur le terrain
Lente, point par point ; lacunes sous les couvertures végétales
Couverture aérienne rapide
Levé rapide à la vitesse de marche
Environnement d’utilisation
Ciel dégagé uniquement
Ciel dégagé ; blocage par des zones d’exclusion aérienne
À l'intérieur, à l'extérieur, sous un auvent, dans les canyons urbains
Précision de positionnement
Maximale (au centimètre près)
Modérée à élevée (varie en fonction de l'altitude)
Élevée (au centimètre près, SLAM avec correction RTK)
Niveau d'investissement
$
$$$$
$$
Sur un site ouvert et sans restriction, un drone peut encore s'avérer l'outil le plus rapide. Dès lors que la canopée, des obstacles ou une zone d'exclusion aérienne entrent en jeu, c'est la méthode de levé SLAM piéton qui permet de mener à bien la mission avec une précision de niveau topographique.
Un processus de travail centralisé, du terrain aux livrables
L'atout majeur du RS10 dans le cadre de ce projet ne résidait pas seulement dans le scanner, mais aussi dans le fait que l'ensemble du processus s'inscrivait au sein d'un même écosystème, de la correction sur le terrain au dessin CAO final, sans aucune conversion de format vers des formats tiers entre les deux étapes. Le travail s'est déroulé en trois étapes.
Étape A : Collecte de données sur le terrain
Une station de base a été installée au-dessus d'un point connu pour fournir des corrections RTK en temps réel. Le RS10 a été connecté à l'application mobile SmartGo et après son initialisation RTK, l'opérateur a parcouru à pied l'intégralité du site de 60 000m². La fusion étroite des technologies RTK et SLAM a permis de maintenir une précision absolue tout au long du parcours, sans nécessiter de boucles de fermeture. La capture sur le terrain a duré environ 30 minutes.
Étape B : Optimisation des données
Le scan brut a été importé dans le logiciel CHCNAV CoPre, où un simple clic a suffi pour lancer le post-traitement SLAM complet et générer un nuage de points optimisé. CoPre exporte les formats standard LAS, LAZ et E57, ainsi que le format RCP (Recap), qui s'ouvre directement dans AutoCAD sans étape de conversion intermédiaire.
Étape C : Dessin au bureau
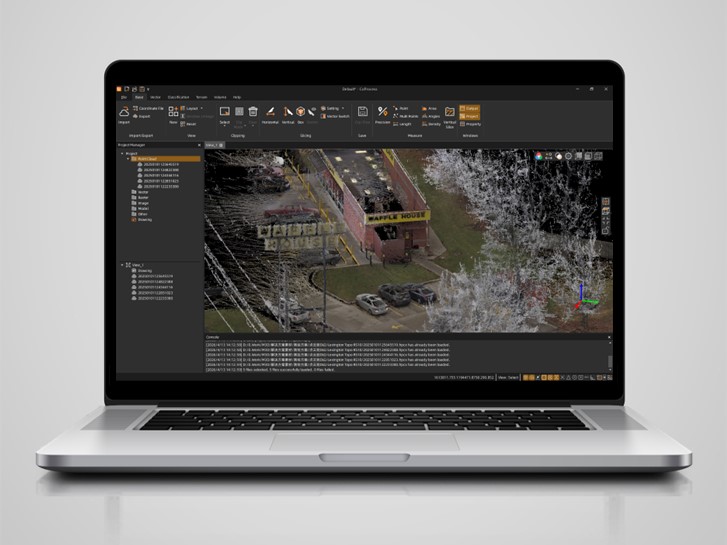
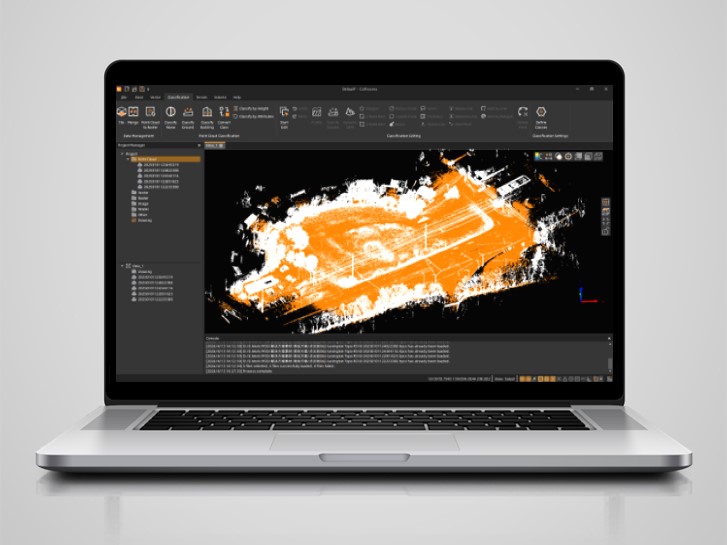
Le nuage de points optimisé a été importé dans CoProcess. Une classification intelligente en un clic a permis de distinguer les points au sol de la végétation, des bâtiments et des autres éléments. À partir des points au sol, un modèle numérique d’altitude, des courbes de niveau espacées d’un pied américain comme requis, ainsi que des points altimétriques ont été générés. Dans une interface familière de type CAO, le géomètre a tracé des lignes vectorielles directement sur le nuage de points, puis a exporté des fichiers DWG et DXF standard qui s’ouvraient nativement dans AutoCAD, prêts à être utilisés avec ses propres modèles conformes aux normes américaines pour les types de lignes, les symboles, les calques et les mises en page.
À gauche : données brutes du nuage de points RS10 affichées dans le logiciel CoProcess avant classification. À droite : points au sol classifiés dans le logiciel, en vue de la modélisation du terrain et de la génération de courbes de niveau.
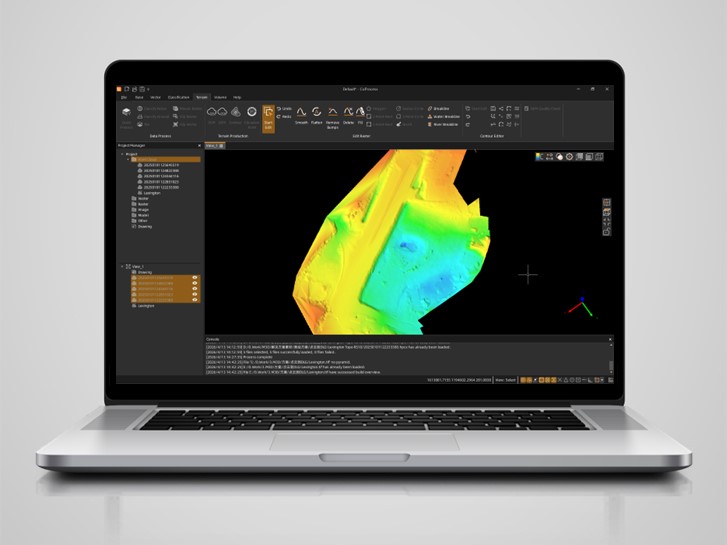
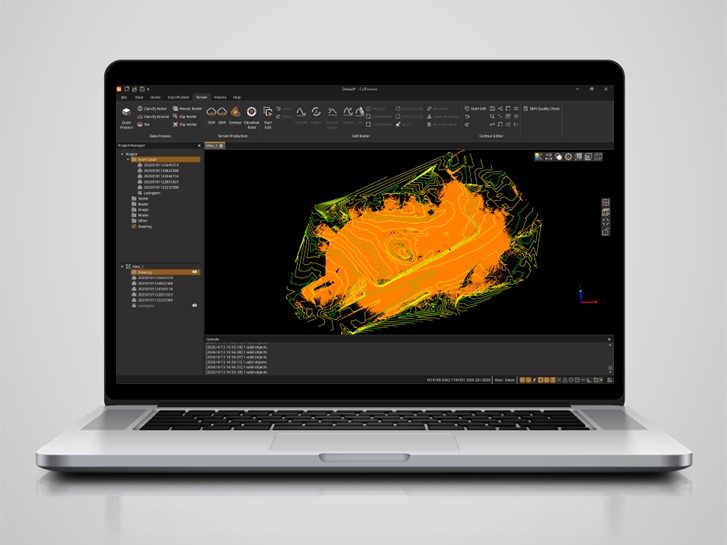
À gauche : un modèle numérique d'élévation et des courbes de niveau générés dans le logiciel CoProcess à partir de données de terrain classifiées. À droite : des lignes vectorielles créées directement sur le nuage de points traité à l'aide d'outils de type CAO dans le logiciel CoProcess.
APIS : une connectivité simplifiée à la station GNSS
Un détail a permis de parachever le flux de travail. Grâce à la technologie CHCNAV APIS, la saisie du numéro de série de la station GNSS CHCNAV dans SmartGo confère instantanément au RS10 le statut « FIX », ce qui permet de transformer automatiquement le nuage de points dans le système de coordonnées approprié, sans aucune intervention manuelle. Pour les projets nécessitant un post-traitement PPK, l’écosystème lit directement les données brutes statiques HCN natives provenant des stations de base CHCNAV, éliminant ainsi les difficultés liées à la conversion vers des fichiers RINEX tiers et les erreurs associées à la saisie manuelle des hauteurs d’antenne et des décalages.
Résultat : un jour, cinq fois plus rapide, aucune conversion
Le levé réalisé à Lexington a été effectué environ cinq fois plus rapidement qu’un processus traditionnel utilisant un mobile GNSS RTK, avec un délai de traitement « du terrain à la carte » d’une seule journée. Ce flux de travail tout-en-un a permis de transformer des nuages de points bruts en MNT précis, en courbes de niveau lissées et en tracés prêts pour la CAO, sans aucune conversion par un logiciel tiers. Le résultat final, issu directement de CoProcess, répondait aux normes cartographiques américaines et n’a nécessité que des retouches mineures. Comme le logiciel ne nécessite qu’une prise en main minimale et fonctionne directement avec le matériel GNSS CHCNAV, cette approche a également permis de réduire considérablement les coûts de main-d’œuvre liés à ce projet.
Carte topographique finale au format DWG/DXF exportée depuis CoProcess, compatible avec AutoCAD, prête à être utilisée pour les livrables topographiques conformes aux normes américaines.
Le flux de travail, depuis la numérisation SLAM avec le RS10 jusqu’au dessin vectoriel dans CoProcess, est incroyablement efficace. Ce qui se démarque vraiment, c’est la fonctionnalité APIS : elle nous permet d’obtenir une solution RTK fixe directement sur le récepteur RS10 SLAM, ce qui nous permet d’obtenir facilement des données de nuage de points avec un système de coordonnées approprié. Pas de conjectures, pas de difficultés liés au post-traitement. L’ensemble de l’écosystème, de l’acquisition sur le terrain au tracé final, est extrêmement convivial pour la cartographie topographique. Cela permet de gagner du temps, de réduire la complexité et fonctionne tout simplement.
iGage Mapping Corporation
Le RS10 en bref
Caractéristiques techniques
Fusion de capteurs
Fusion approfondie RTK, LiDAR et SLAM visuel
Précision absolue
Inférieure à 5 cm à l’horizontale et à la verticale
Pour les équipes de levés qui se demandent comment gérer les grands sites topographiques où l'utilisation de drones est impossible et où le travail point par point s'avère trop lent, le projet Lexington constitue un exemple parlant : un scanner SLAM portable, soutenu par un écosystème logiciel connecté et complet, permet de réaliser une cartographie professionnelle et conforme aux normes en un temps record. Le RS10 s'inscrit dans la gamme de solutions CHCNAV 3D de cartographie mobile, de levés topographiques et d'ingénierie, aux côtés du scanner portable RS7 destiné aux environnements intérieurs et aux zones avec peu de repères visuels.
____
À propos de CHC Navigation
CHC Navigation (CHCNAV) développe des solutions avancées de cartographie, de navigation et de positionnement conçues pour améliorer la productivité et l'efficacité. Au service de secteurs tels que le géospatial, l'agriculture, le contrôle des machines et l'autonomie, CHCNAV propose des technologies innovantes qui donnent les moyens d'agir aux professionnels et favorisent le progrès de l'industrie. Avec une présence mondiale couvrant plus de 140 pays et une équipe de plus de 2 200 professionnels, CHC Navigation est reconnue comme un leader dans le secteur géospatial et au-delà. Pour plus d’informations sur CHC Navigation [Huace:300627.SZ], rendez-vous sur : https://geospatial.chcnav.com/about/overview
Vous avez une question sur nos solutions de cartographie mobile ?