Cartografia topográfica integral numa zona de proibição de voo com o CHCNAV RS10
2026-06-25
Os topógrafos profissionais enfrentam um dilema habitual em grandes locais de levantamento topográfico. Um rover GNSS RTK tradicional é preciso, mas lento, o que muitas vezes transforma um local de grandes dimensões em dias de caminhada ponto a ponto. O mapeamento por drone é rápido em espaços abertos, mas é impedido de voar em zonas de proibição de voo, tem dificuldades sob a copa das árvores e não consegue ver o solo por baixo de si. Num projeto recente de 60 000m² em Lexington, no Kentucky, ambas as limitações se fizeram sentir ao mesmo tempo. A iGage Mapping Corporation executou o trabalho com o scanner CHCNAV RS10 SLAM e o ecossistema de software CHCNAV, tendo concluído a aquisição de dados no terreno em cerca de meia hora, com um mapa topográfico pronto a ser utilizado entregue no mesmo dia.
O projeto: um levantamento de 60 000 m² onde os drones não podiam voar
Matthew Sibole, um agrimensor licenciado no Kentucky que trabalha com a iGage, precisava de realizar um levantamento topográfico completo de um terreno de 14,8 acres em Lexington. O briefing era exigente em três aspetos ao mesmo tempo:
Resultados profissionais: desenhos vetoriais de edifícios, estradas, vegetação e caixas de inspeção, curvas de nível com intervalos de um pé americano e grelhas de elevação, tudo com uma precisão de medição de, no máximo, um pé americano.
Uma zona de exclusão aérea: o terreno situava-se dentro de um espaço aéreo restrito, onde não era permitido o levantamento aéreo com drones, o que excluiu a opção mais rápida a que a maioria das equipas recorreria.
Um prazo apertado: o cliente precisava de resultados com qualidade topográfica no prazo de 24 horas.
Um rover GNSS RTK ponto a ponto poderia ter atingido a precisão necessária, mas não o prazo. Os drones poderiam ter cumprido o prazo, mas não estavam autorizados a voar. O trabalho exigia um método que captasse rapidamente os detalhes do terreno, a pé, sem comprometer a precisão do posicionamento.
O RS10 capta uma nuvem de pontos contínua à medida que o operador percorre o local, permitindo uma recolha eficiente de dados topográficos com qualidade de levantamento, sem necessidade de mapeamento aéreo ou medições ponto a ponto.
Por que é que o SLAM superou o rover RTK e os drones neste local
Um recetor GNSS padrão regista um ponto de cada vez. O CHCNAV RS10, por sua vez, capta continuamente uma nuvem de pontos densa enquanto o operador caminha, combinando RTK, LiDAR e SLAM visual numa fusão profunda. É essa fusão que lhe permite manter uma precisão absoluta onde um drone ou um rover GNSS simples falharia: sob a copa das árvores, em canyons urbanos com o céu obstruído e dentro do tipo de zona de exclusão aérea que definiu este projeto. Como o RTK restringe a trajetória do SLAM, o operador não precisa de percorrer percursos circulares para manter os dados alinhados.
Fator
Recetor GNSS
LiDAR para UAV
Scanner SLAM (RS10 + CoProcess)
Aquisição no terreno
Lenta, ponto a ponto; lacunas em áreas cobertas
Cobertura aérea rápida
Digitalização rápida à velocidade de marcha
Ambiente de funcionamento
Apenas céu aberto
Céu aberto; bloqueado por zonas de exclusão aérea
Em recintos fechados, ao ar livre, sob copas de árvores, canyons urbanos
Precisão posicional
Máxima (centímetros absolutos)
Moderada a elevada (varia com a altitude)
Elevada (nível de centímetros, SLAM com restrição RTK)
Nível de investimento
$
$$$$
$$
Num local aberto e sem restrições, um drone pode continuar a ser a ferramenta mais rápida. No entanto, assim que a copa das árvores, os obstáculos ou uma zona de proibição de voo entram em cena, o fluxo de trabalho SLAM a pé é o que continua a permitir concluir o trabalho com precisão topográfica.
O fluxo de trabalho integrado, do campo até ao produto final
O ponto forte do RS10 neste projeto não foi apenas o scanner, mas também o facto de todo o fluxo de trabalho se ter mantido dentro de um único ecossistema, desde a correção no terreno até ao desenho CAD final, sem conversões de formatos de terceiros pelo meio. O trabalho decorreu em três fases.
Passo A: Aquisição de dados no terreno
Foi instalada uma estação base num ponto conhecido, com um serviço CORS local disponível para correções em tempo real. O RS10 ligou-se à aplicação móvel SmartGo e, com uma solução RTK fixa, o operador percorreu a pé toda a áreade 60 000m². A fusão profunda de RTK e SLAM manteve uma precisão absoluta ao longo de todo o percurso, sem necessidade de fechos de loop. A captura no terreno demorou cerca de 30 minutos.
Passo B: Otimização dos dados
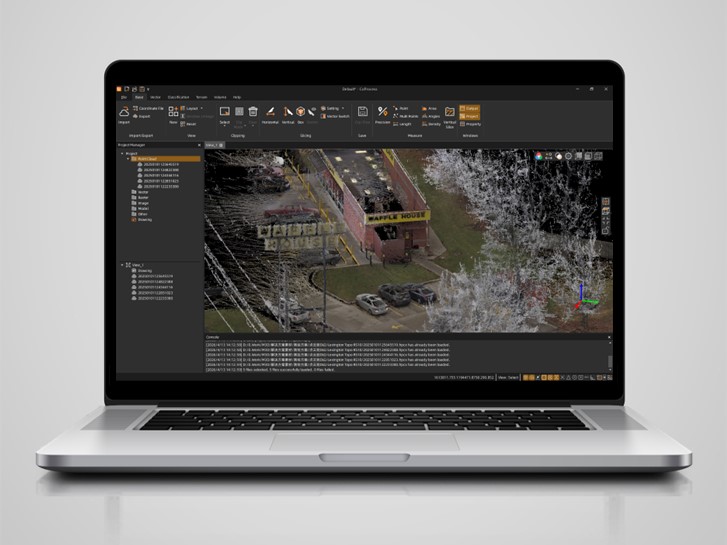
A digitalização em bruto foi importada para o CoPre, onde, com um único clique, foi executado o pós-processamento SLAM completo, resultando numa nuvem de pontos limpa e otimizada. O CoPre exporta os formatos padrão da indústria LAS, LAZ e E57, bem como o formato RCP (Recap), que se abre diretamente no AutoCAD sem qualquer etapa de conversão intermédia.
Passo C: Desenho no consultório
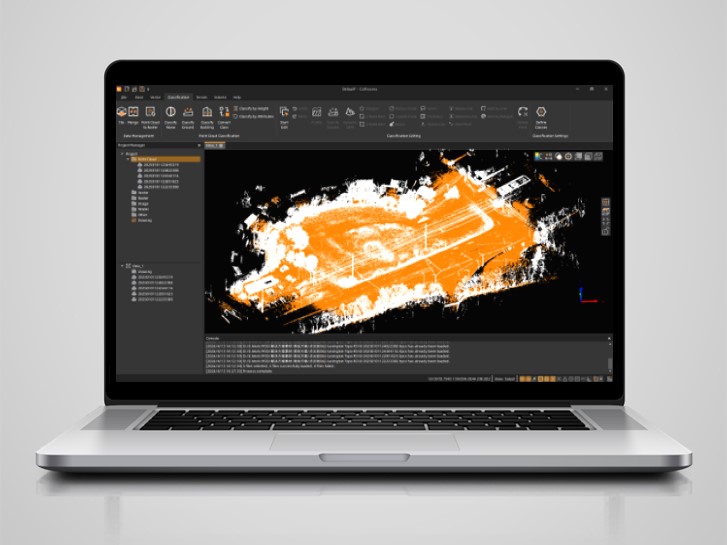
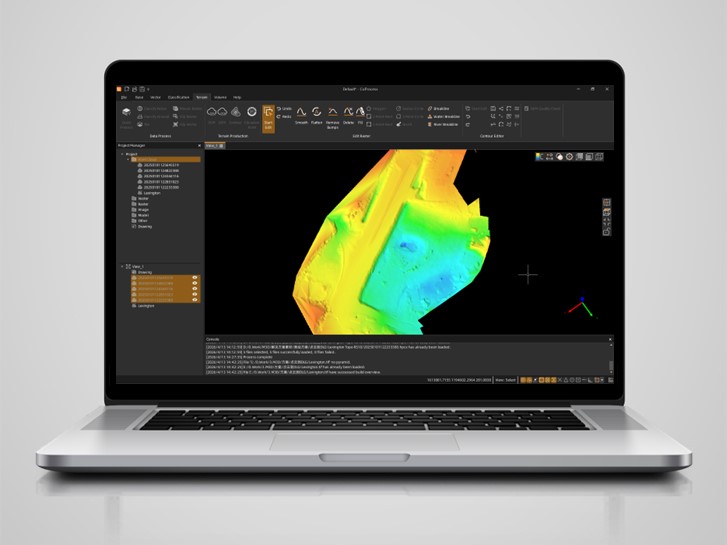
A nuvem otimizada foi importada para o CoProcess. A classificação inteligente com um único clique separou os pontos do solo da vegetação, edifícios e outros elementos. A partir dos pontos do solo, foram gerados um Modelo Digital de Elevação, curvas de nível com os intervalos necessários de um pé americano e pontos de elevação. Numa interface familiar ao estilo CAD, o topógrafo desenhou linhas vetoriais diretamente na nuvem de pontos e, em seguida, exportou ficheiros DWG e DXF padrão que se abriram nativamente no AutoCAD, prontos para as suas próprias plantilhas, em conformidade com as normas dos EUA, relativas a tipos de linha, símbolos, camadas e disposições de folhas.
À esquerda: Dados brutos da nuvem de pontos do RS10 apresentados no software CoProcess antes da classificação. À direita: Pontos do terreno classificados no software, preparando os dados para a modelação do terreno e a geração de curvas de nível.
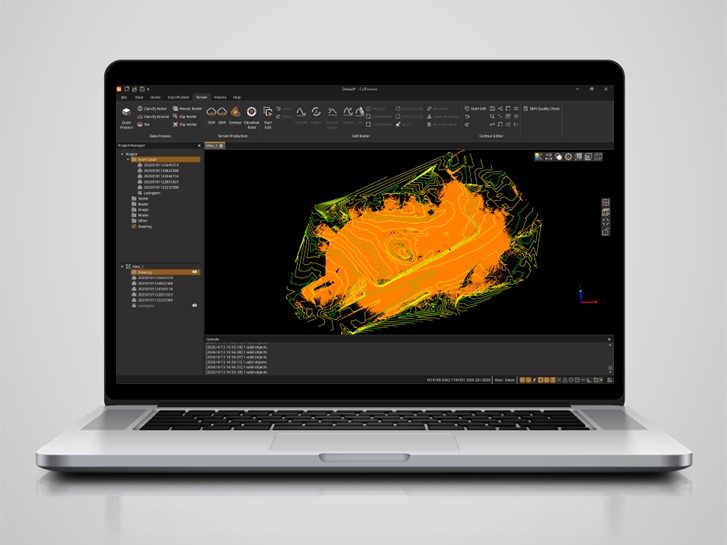
À esquerda: Um modelo digital de elevação e curvas de nível gerados no software CoProcess a partir de dados de terreno classificados. À direita: Linhas vetoriais criadas diretamente na nuvem de pontos processada, utilizando ferramentas do tipo CAD no software CoProcess.
APIS: Uma solução fixa diretamente no scanner
Um pormenor unificou todo o fluxo de trabalho. Através da tecnologia CHCNAV APIS, ao introduzir o número de série de um recetor GNSS CHCNAV no SmartGo, o RS10 obtém instantaneamente o estado FIX, pelo que a nuvem de pontos é transformada automaticamente para o sistema de coordenadas correto, sem qualquer intervenção manual. Para projetos que necessitem de pós-processamento PPK, o ecossistema lê diretamente os dados estáticos HCN nativos das estações base CHCNAV, eliminando o incómodo da conversão para ficheiros RINEX de terceiros e os erros associados à introdução manual das alturas e deslocamentos das antenas.
O resultado: um dia, cinco vezes mais rápido, sem conversões
O levantamento com o Lexington foi concluído cerca de cinco vezes mais rápido do que um fluxo de trabalho tradicional com um rover GNSS RTK, com o tempo de processamento do terreno para o mapa a ser concluído num único dia. O fluxo de trabalho integrado transformou nuvens de pontos em bruto em DEMs precisos, contornos suaves e traçados prontos para CAD sem qualquer conversão por parte de terceiros, e o produto final cumpriu as normas de cartografia dos EUA diretamente no CoProcess, com apenas pequenos retoques. Como o software apresenta uma curva de aprendizagem mínima e funciona diretamente com o hardware GNSS da CHCNAV, esta abordagem também reduziu substancialmente os custos de mão-de-obra do trabalho.
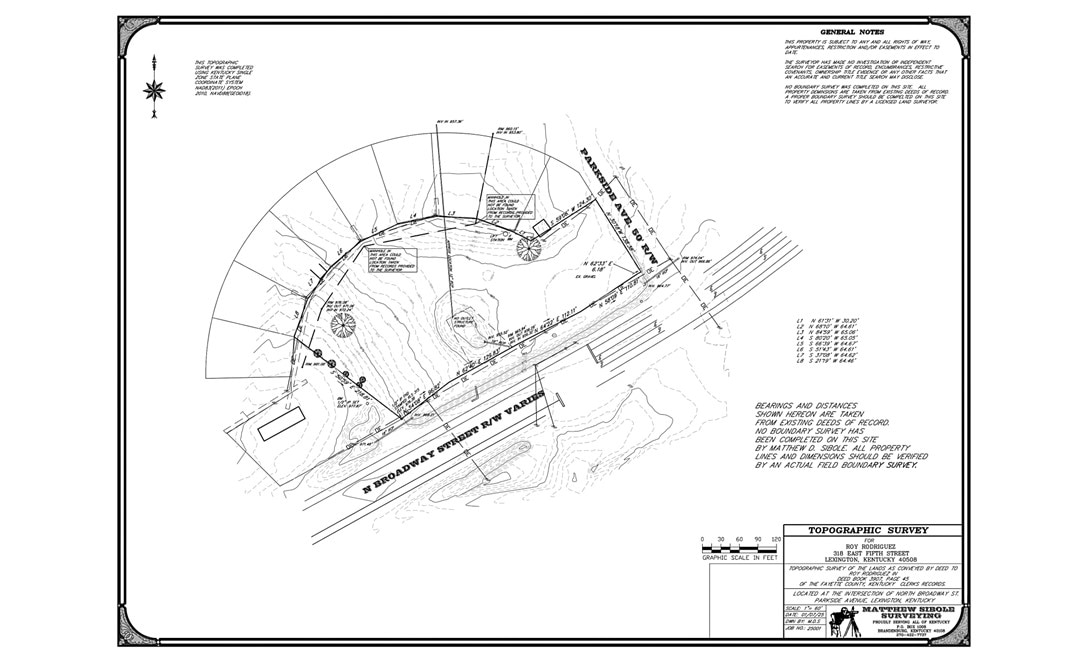
Mapa topográfico final em formato DWG/DXF exportado do CoProcess com compatibilidade nativa com o AutoCAD, pronto para entrega de acordo com as normas de levantamento topográfico dos EUA.
O fluxo de trabalho, desde a digitalização SLAM com o RS10 até ao desenho vetorial no CoProcess, é incrivelmente eficiente. O que realmente se destaca é a funcionalidade APIS, que nos permite obter uma solução RTK fixa diretamente no dispositivo SLAM, pelo que obtemos facilmente dados de nuvem de pontos com um sistema de coordenadas adequado. Sem suposições, sem dores de cabeça com o pós-processamento. Todo o ecossistema, desde a aquisição no terreno até ao traçado final, é extremamente intuitivo para o mapeamento topográfico. Poupa tempo, reduz a complexidade e simplesmente funciona.
Para as equipas de levantamento que ponderam como lidar com grandes locais topográficos onde os drones não podem voar e o trabalho ponto a ponto é demasiado lento, o projeto Lexington constitui um exemplo claro: um scanner SLAM portátil, apoiado por um ecossistema de software integrado e completo, pode proporcionar um mapeamento profissional e em conformidade com as normas numa fração do tempo. O RS10 integra-se nas soluções de mapeamento móvel 3D, levantamento topográfico e engenharia da CHCNAV, a par do scanner portátil RS7, destinado a ambientes interiores e com poucos elementos de referência.
____
Sobre a CHC Navigation
A CHC Navigation (CHCNAV) desenvolve soluções avançadas de cartografia, navegação e posicionamento concebidas para aumentar a produtividade e a eficiência. Atuando em setores como o geoespacial, a agricultura, o controlo de máquinas e a autonomia, a CHCNAV fornece tecnologias inovadoras que capacitam os profissionais e impulsionam o avanço do setor. Com uma presença global que abrange mais de 140 países e uma equipa de mais de 2 200 profissionais, a CHC Navigation é reconhecida como líder no setor geoespacial e não só. Para mais informações sobre a CHC Navigation [Huace:300627.SZ], visite: https://geospatial.chcnav.com/about/overview
Tem alguma dúvida sobre as nossas soluções de mapeamento móvel?