Systèmes de cartographie mobile : Une approche plus intelligente de la collecte de données géospatiales
2025-11-28
Présentation de la cartographie mobile : Saisir des données géospatiales avec rapidité et précision
Lessystèmes de cartographie mobile (MMS) représentent une avancée significative dans la manière dont les données géospatiales sont capturées et appliquées. Ces plateformes intègrent des technologies telles que le LiDAR, le GNSS, les unités de mesure inertielle (IMU) et l'imagerie à haute résolution dans un système unifié capable de collecter des informations spatiales denses tout en étant en mouvement. Contrairement aux méthodes d'arpentage traditionnelles qui capturent des points isolés, les MMS génèrent des ensembles de données continues qui représentent l'environnement physique de manière plus détaillée et à plus grande vitesse.
L'adoption croissante de la cartographie mobile est motivée par le besoin de données géospatiales plus granulaires et plus opportunes, en particulier pour soutenir le développement des villes intelligentes, la gestion des services publics et la modélisation des informations sur les bâtiments (BIM). Les méthodes traditionnelles sont souvent trop gourmandes en main-d'œuvre, en temps et en informations. En revanche, une seule mission de cartographie mobile peut capturer l'équivalent de plusieurs semaines de données d'enquête statiques, ce qui permet de rationaliser les flux de travail et de réduire les coûts opérationnels.
Les progrès réalisés en matière de résolution LiDAR, de précision GNSS et de technologie SLAM ont rendu la cartographie mobile plus précise et plus fiable que jamais. Les systèmes avancés peuvent capturer des millions de points 3D par seconde avec une précision inférieure au centimètre et maintenir le positionnement dans des environnements où la visibilité des satellites est limitée ou inexistante. Ces développements ont fait des systèmes de cartographie mobile un outil clé pour la planification d'infrastructures basées sur des données et l'intelligence géospatiale.
De la route à la réalité : Le flux de travail du système de cartographie mobile
Première étape : planification de la mission et installation du système
Le processus de cartographie mobile commence bien avant l'arrivée sur le site. Au cours de la phase de planification, les équipes d'enquêteurs utilisent un logiciel de planification de mission pour définir les limites du projet, optimiser les itinéraires de conduite et déterminer l'emplacement des points de contrôle au sol (GCP). Cette étape garantit une couverture efficace des données et permet un géoréférencement précis.
La préparation du système suit, notamment le montage du MMS sur un véhicule, l'étalonnage des capteurs et l'exécution de contrôles de diagnostic pour vérifier la synchronisation du système. Le processus de pré-déploiement est essentiel pour obtenir des résultats fiables sur le terrain.
Deuxième étape : capturer des données haute densité en mouvement
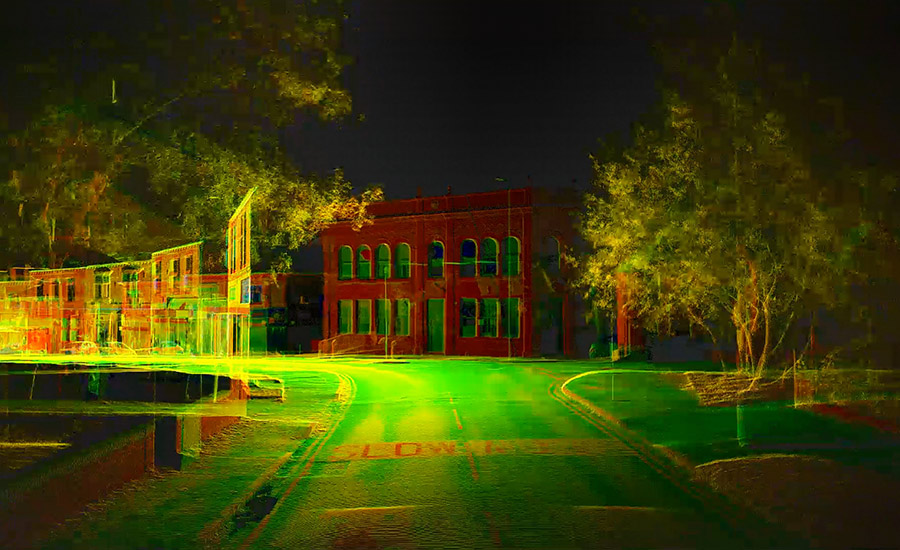
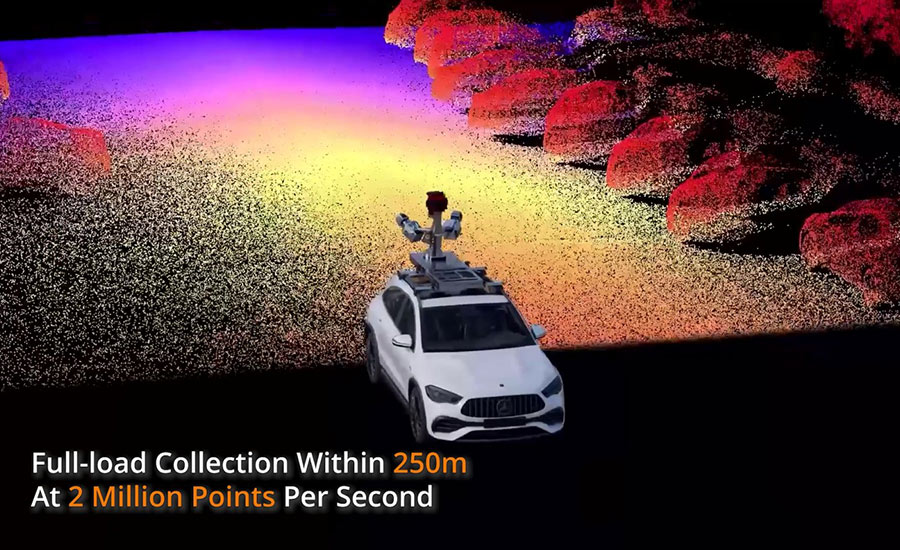
Pendant l'acquisition, le véhicule se déplace le long des routes définies à des vitesses contrôlées (généralement entre 20 et 60 km/h) afin de garantir une densité de données suffisante. Le système de cartographie mobile AU20 de CHCNAV, par exemple, est doté d'une configuration double LiDAR capable de collecter jusqu'à deux millions de points par seconde, couvrant un large champ de vision pour capturer les caractéristiques de la chaussée et de l'infrastructure environnante.
Parallèlement, un système GNSS/IMU étroitement intégré enregistre la position et l'orientation du véhicule, créant ainsi une trajectoire précise. Des caméras panoramiques à haute résolution capturent des images qui peuvent ensuite être utilisées pour améliorer le nuage de points avec un contexte photoréaliste. Tous les flux de données sont horodatés et stockés en vue d'un post-traitement.
Élargir la couverture : Cartographie basée sur le SLAM pour les zones inaccessibles
Dans les zones où les véhicules ne peuvent pas circuler, comme les allées étroites ou les zones piétonnes, la cartographie mobile peut être étendue à l'aide de configurations portables ou vestimentaires. Le scanner RS10 de CHCNAV permet aux opérateurs de cartographier ces espaces à pied en utilisant la technologie SLAM, qui maintient la précision du positionnement sans signaux GNSS.
Le système AU20 peut également être adapté à une utilisation en sac à dos, offrant ainsi une précision digne d'un véhicule dans des zones peu accessibles. Cette approche hybride garantit une couverture spatiale complète tout en améliorant la qualité globale des données grâce à la fusion des trajectoires.
Traitement rationalisé : Transformer les données de terrain en informations exploitables
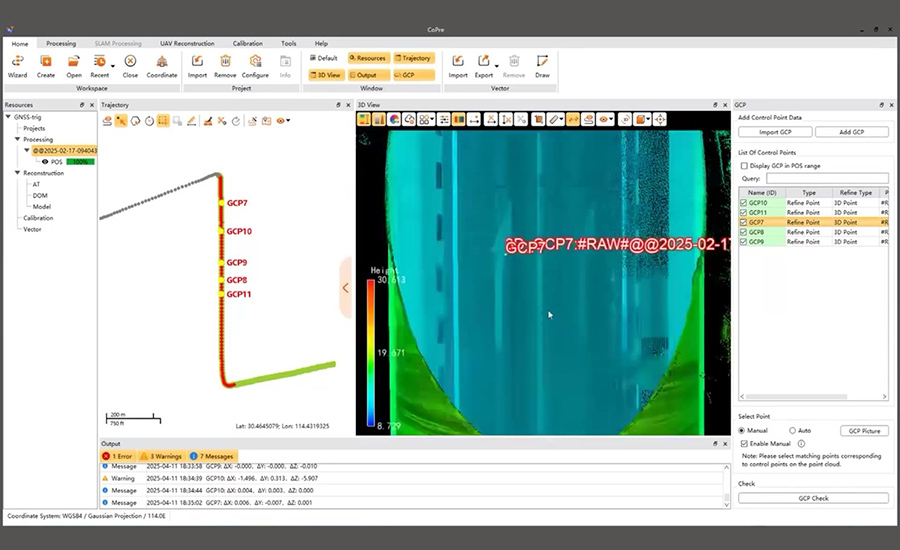
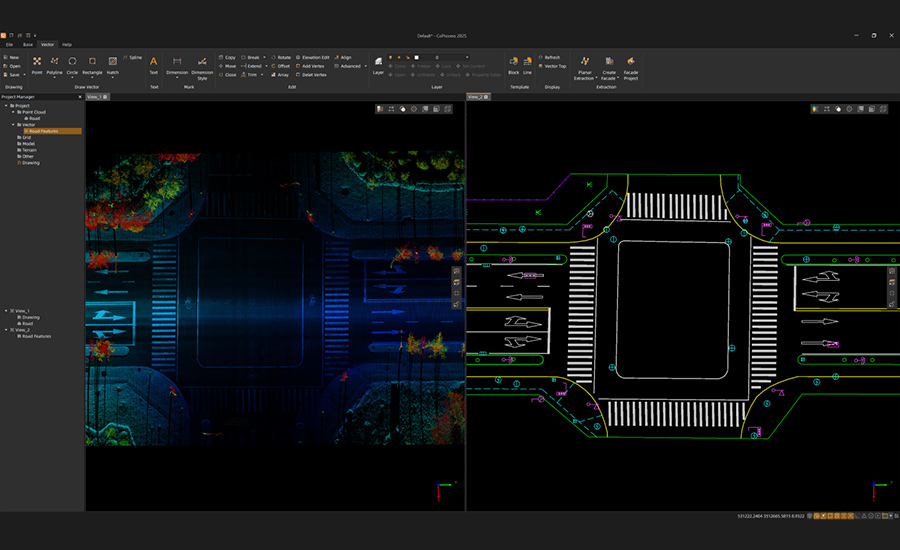
Les outils logiciels intégrés de CHCNAV rationalisent le passage des données brutes à des livrables exploitables. Les plateformes CoPre et CoProcess prennent en charge le nettoyage automatisé des nuages de points, l'extraction des caractéristiques et la coloration des images panoramiques, réduisant ainsi considérablement la charge de travail manuelle et le temps de traitement.
Cet écosystème logiciel permet des flux de travail à haut débit pour des applications telles que l'inventaire des actifs routiers, la cartographie des couloirs de services publics et la modélisation urbaine en 3D. En combinant une collecte de données robuste avec un traitement automatisé, CHCNAV réduit le temps entre le travail sur le terrain et la livraison, améliorant à la fois la productivité et la cohérence.
Regarder vers l'avenir : Le rôle des systèmes de cartographie mobile dans l'acquisition de données géospatiales
La cartographie mobile est devenue une technologie fondamentale pour l'acquisition de données géospatiales. Les systèmes de cartographie mobile tels que le CHCNAV AU20 MMS offrent la flexibilité nécessaire pour fonctionner dans divers environnements tout en conservant la précision requise pour les applications professionnelles de topographie et d'ingénierie.
Associé à un écosystème logiciel rationalisé, le système de cartographie mobile prend désormais en charge l'ensemble du cycle de vie des projets, de la planification et de la collecte à l'analyse et à la livraison. Pour les organisations travaillant dans le domaine des transports, du développement urbain ou de la maintenance des infrastructures, l'adoption des technologies de cartographie mobile offre une voie claire vers l'amélioration de l'efficacité, de la qualité des données et de la vision opérationnelle.
La compréhension et l'application de ces outils sont de plus en plus cruciales à une époque où la connaissance de l'espace est à la base d'une prise de décision efficace dans tous les secteurs.
____
À propos de CHC Navigation
CHC Navigation (CHCNAV) développe des solutions avancées de cartographie, de navigation et de positionnement conçues pour accroître la productivité et l'efficacité. Au service d'industries telles que le géospatial, l'agriculture, la construction et l'autonomie, CHCNAV fournit des technologies innovantes qui permettent aux professionnels de se prendre en charge et de faire progresser l'industrie. Avec une présence mondiale dans plus de 140 pays et une équipe de plus de 2 000 professionnels, CHC Navigation est reconnue comme un leader dans l'industrie géospatiale et au-delà. Pour plus d'informations sur CHC Navigation [Huace:300627.SZ], veuillez consulter : www.chcnav.com