Perguntas e respostas da CHC Navigation com Byron Yuan: A visão por detrás da inovação do CHCNAV RS10
2025-04-18
A evolução do GNSS, SLAM e LiDAR na topografia
A procura de dados geoespaciais exactos estimulou os avanços nas tecnologias de posicionamento e cartografia, incluindo os Sistemas Globais de Navegação por Satélite(GNSS), a Deteção e o Rastreio de Luz(LiDAR) e a Localização e Cartografia Simultâneas(SLAM).
O GNSS, alimentado por constelações como o GPS (EUA), GLONASS (Rússia), Galileo (UE) e BeiDou (China), revolucionou o posicionamento com o advento dos métodos cinemáticos em tempo real (RTK) na década de 1990. As correcções RTK melhoraram drasticamente a precisão, reduzindo os erros GNSS de metros para centímetros e permitindo uma geolocalização de alta precisão em tempo real.
Entretanto, o LiDAR evoluiu para uma ferramenta de deteção remota madura que utiliza impulsos laser para criar nuvens de pontos de alta resolução. A sua capacidade de captar detalhes topográficos intrincados tornou-a indispensável para aplicações como a inspeção de infra-estruturas e a gestão florestal.
O LiDAR pode captar o mundo real com nuvens de pontos
Originalmente desenvolvido para a robótica, o SLAM acrescentou uma nova dimensão ao permitir que os dispositivos mapeassem e navegassem em ambientes desconhecidos em tempo real. Os avanços nos sensores e na computação alargaram a utilidade do SLAM aos veículos aéreos não tripulados, à navegação autónoma e à modelação 3D.
Atualmente, a integração destas tecnologias está a transformar os fluxos de trabalho de levantamento topográfico. Soluções como o RS10 da CHCNAV combinam o posicionamento absoluto do GNSS RTK, as capacidades de mapeamento dinâmico do SLAM e a recolha de dados ricos do LiDAR.
Entrevista com Byron Yuan, Diretor do CHCNAV 3D Mobile Mapping: A visão por detrás do RS10
Byron Yuan, Diretor de Soluções de Cartografia Móvel 3D na CHC Navigation, fornece informações sobre o inovador RS10, um sistema pioneiro que integra as tecnologias GNSS e SLAM. Nesta sessão de perguntas e respostas, explora a evolução do sistema, as suas caraterísticas excepcionais e o seu potencial futuro. Destaca também a forma como o RS10 aborda os desafios críticos da topografia e estabelece novos padrões industriais de eficiência e precisão.
O que é o RS10 e em que é que difere das soluções GNSS tradicionais?
O RS10 é um sistema de mapeamento móvel 3D que combina GNSS RTK, SLAM e LiDAR numa solução compacta e portátil. Ao contrário dos dispositivos tradicionais apenas GNSS que dependem exclusivamente de sinais de satélite para posicionamento, o RS10 utiliza SLAM para manter a precisão em áreas com sinais GNSS limitados ou inexistentes, como florestas, desfiladeiros urbanos e espaços subterrâneos.
Ao integrar estas tecnologias, o RS10 fornece mapeamento e posicionamento 3D fiável em tempo real. Esta versatilidade torna-o adequado para uma vasta gama de aplicações, incluindo levantamentos de locais de construção e inspecções de infra-estruturas.
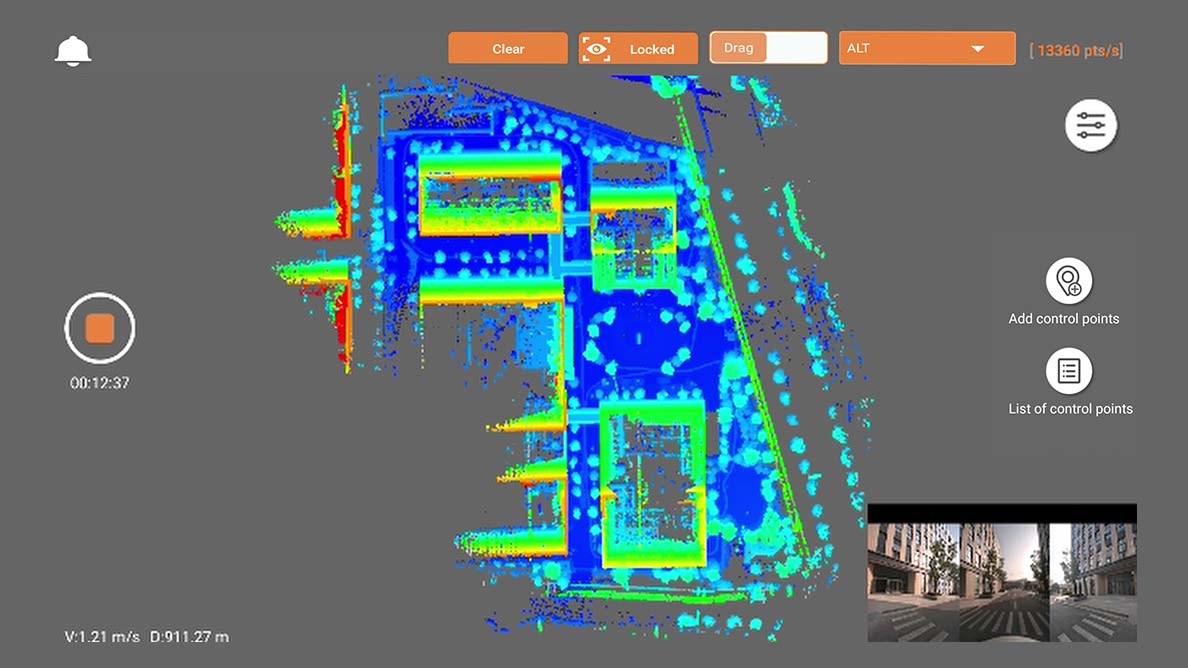
A visualização de nuvens de pontos em tempo real proporciona uma maior eficiência de digitalização
O que é a tecnologia SLAM e como é que está integrada com o GNSS RTK no RS10?
Byron Yuan: SLAM, ou Simultaneous Localization and Mapping (Localização e Mapeamento Simultâneos), é uma tecnologia que utiliza sensores como câmaras, LiDAR e sistemas de navegação inercial para observar e interpretar o ambiente, criando simultaneamente um mapa. Desempenha um papel fundamental em aplicações como o mapeamento, a modelação 3D e a navegação autónoma, incluindo a prevenção de obstáculos para robótica e drones.
No RS10, adoptamos uma abordagem única ao associar fortemente os dados brutos de medição SLAM ao GNSS RTK. Em vez de simplesmente combinar os resultados finais do SLAM e do GNSS, esta abordagem integra os dados a um nível mais profundo. Reconhecendo a natureza diversa e dinâmica dos ambientes de levantamento, o RS10 utiliza um algoritmo adaptativo para ajustar a ponderação dos dados SLAM e RTK com base nas condições ambientais. Esta abordagem assegura uma precisão de posicionamento e um desempenho cartográfico óptimos à medida que as condições mudam.
A fusão de GNSS e SLAM tem vantagens únicas
Quais são as vantagens desta integração?
Byron Yuan: O RS10 aproveita os pontos fortes tanto dos receptores GNSS como dos scanners SLAM autónomos, oferecendo vantagens significativas sobre cada um deles.
Com os receptores GNSS, problemas como os erros de deslizamento de ciclo - causados pela interferência do sinal de obstruções como árvores, edifícios ou terreno - podem comprometer a precisão do posicionamento. O RS10 resolve este problema incorporando o SLAM, que fornece dados de posição estáveis em áreas com sinais GNSS fracos ou inexistentes, assegurando uma maior eficiência de medição e fiabilidade nas operações diárias.
Os scanners SLAM autónomos, por outro lado, sofrem frequentemente de erros de desvio cumulativos, em que as imprecisões aumentam à medida que o dispositivo se desloca através de um ambiente. Estes sistemas dependem normalmente de pontos de controlo ou correcções externas para manter a precisão. O RS10 supera esta limitação através da integração do GNSS RTK, que actua como uma referência em tempo real para corrigir os erros de deriva. Este facto não só melhora a precisão do levantamento, como também reduz a necessidade de pós-processamento extensivo.
Combinando estas tecnologias, o RS10 proporciona um posicionamento preciso e um mapeamento detalhado que funciona eficazmente tanto em ambientes com GNSS como em ambientes com GNSS.
O que inspirou o desenvolvimento do RS10?
Byron Yuan: Através de uma pesquisa de mercado, identificámos vários pontos problemáticos que os topógrafos enfrentavam normalmente com os scanners SLAM existentes. Estes incluíam precisão limitada em ambientes complexos, dependência de caminhos de circuito fechado para correção de erros e ecossistemas que não eram fáceis de utilizar. Estes desafios sublinharam a necessidade de uma solução especificamente concebida para a indústria de topografia. Isto inspirou-nos a desenvolver o RS10, um sistema que integra na perfeição o GNSS de alta precisão com a tecnologia SLAM para resolver estas limitações.
A caraterística Loop-Free elimina a necessidade de fechar o laço
Que desafios enfrentou durante o desenvolvimento do RS10?
Byron Yuan: O maior desafio foi alcançar a elevada precisão de medição que pretendíamos - uma precisão absoluta de 5 cm e uma precisão relativa de 1 cm, independentemente do cenário. Estes objectivos ambiciosos exigiram uma inovação e esforços tecnológicos significativos.
Cerca de seis meses após o início do projeto, deparámo-nos com a incerteza sobre se estes objectivos seriam alcançáveis. Para ultrapassar esta situação, adoptámos uma abordagem de desenvolvimento ágil que incluía métodos de teste iterativos como os utilizados pela SpaceX. Isto envolveu a construção de protótipos virados para o cliente numa fase inicial do processo.
O nosso primeiro protótipo ficou aquém dos objectivos de precisão e revelou problemas críticos de engenharia. Por exemplo, o motor que acciona a rotação do LiDAR - um componente essencial para manter uma precisão de varrimento consistente - necessitou de seis iterações de design ao longo de um ano antes de cumprir os padrões de desempenho. Através destes aperfeiçoamentos iterativos, resolvemos gradualmente os desafios técnicos e acabámos por cumprir os rigorosos requisitos de precisão.
Quais são as principais caraterísticas do RS10 que mais vos entusiasmam?
Byron Yuan: Duas das inovações mais interessantes do RS10 são o SFix e o Vi-LiDAR, que redefinem as abordagens tradicionais de posicionamento e medição sem contacto.
O SFix aproveita a forte integração do GNSS e do SLAM para fornecer uma precisão de posição de até 5 cm num minuto, mesmo em ambientes com sinais GNSS obstruídos ou com interferências. Esta capacidade torna o RS10 altamente versátil, permitindo aplicações como levantamentos em interiores, onde as soluções tradicionais apenas com GNSS são insuficientes.
Durante o processo de desenvolvimento, o nosso objetivo era revolucionar os fluxos de trabalho de medição sem contacto utilizando o V-LiDAR, melhorando a eficiência e a precisão. Inicialmente, o conceito centrava-se na utilização do LiDAR para captar coordenadas de pontos específicos no terreno, o que exigia uma orientação manual.
No entanto, avançámos com esta ideia para eliminar a necessidade de uma mira precisa. O RS10 introduz um fluxo de trabalho inovador, em que os topógrafos podem simplesmente captar uma imagem do ambiente e selecionar diretamente os pontos de medição nessa imagem. Esta abordagem não só atenua os erros provocados pelos tremores das mãos, como também melhora significativamente a fiabilidade e a eficiência, particularmente em áreas de levantamento complexas ou de difícil acesso, transformando o processo de medição sem contacto.
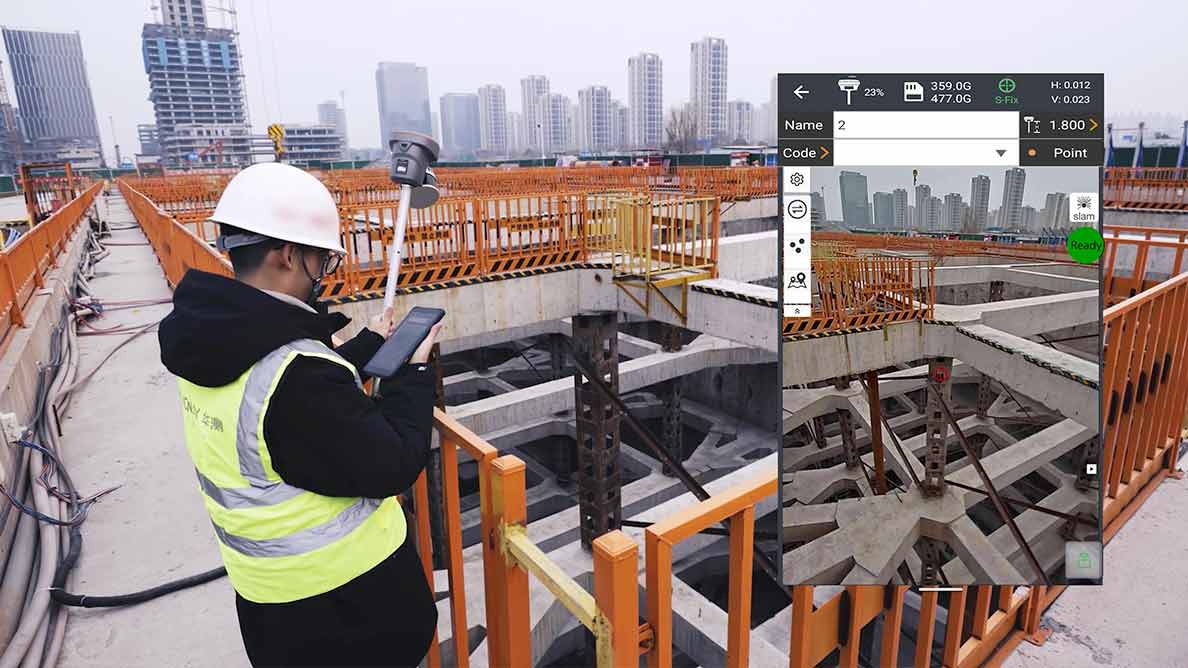
Um topógrafo está a utilizar a função V-LiDAR
Como é que o RS10 garante uma digitalização eficiente?
Byron Yuan: A digitalização eficiente é conseguida através de várias inovações concebidas para melhorar o desempenho em aplicações do mundo real.
Uma inovação chave é a nossa tecnologia Loop-Free, que elimina a necessidade de os topógrafos revisitarem as áreas para fechar os loops. Isto optimiza o percurso de varrimento, reduzindo o tempo de levantamento sem sacrificar a precisão dos dados. Além disso, o RS10 possui baterias de troca a quente, permitindo um funcionamento ininterrupto e sessões de varrimento prolongadas sem desligar o dispositivo.
Para manter a fiabilidade e a qualidade dos dados, introduzimos a funcionalidade Alerta de Precisão. Integrada no sistema de visualização de nuvens de pontos em tempo real do RS10, fornece feedback imediato sobre a qualidade dos dados. Os topógrafos podem resolver potenciais problemas durante a digitalização inicial, minimizando a necessidade de repetir as digitalizações e assegurando a captura de dados de alta qualidade na primeira passagem.
Como vê o futuro de produtos como o RS10?
Byron Yuan: A tecnologia SLAM está destinada a transformar a topografia, substituindo as ferramentas tradicionais, como as estações totais e os receptores GNSS RTK, em mais cenários. À medida que a sua adoção cresce, esperamos avanços significativos nos algoritmos SLAM para melhorar a precisão e a estabilidade. Ao mesmo tempo, as soluções de software tornar-se-ão mais avançadas e fáceis de utilizar para melhor servir as diversas necessidades da indústria.
Olhando para o futuro, a integração do SLAM com tecnologias de modelação visual e 3D irá melhorar ainda mais ferramentas como o RS10. Por exemplo, a combinação do SLAM com a modelação Gaussiana 3D poderá permitir a criação de gémeos digitais altamente realistas que fornecem representações detalhadas e interactivas de ambientes físicos. Estas inovações poderão expandir as aplicações do SLAM para áreas como a engenharia civil, o planeamento urbano e a realidade virtual, criando novas oportunidades de eficiência e inovação.
A inovação tecnológica do RS10 traz mais possibilidades ao topógrafo
Reflexões finais
O RS10 incorpora o compromisso da CHC Navigation em alargar os limites da tecnologia geoespacial através da integração perfeita de GNSS, SLAM e LiDAR. Como Byron Yuan salienta, inovações como o SFix e o Vi-LiDAR respondem eficazmente aos desafios da indústria e proporcionam precisão em ambientes difíceis. Com as suas capacidades avançadas, o RS10 não só redefine os fluxos de trabalho de levantamento topográfico tradicionais, como também estabelece as bases para aplicações SLAM mais alargadas, abrindo novas possibilidades na modelação 3D e na criação de gémeos digitais.
____
Sobre a CHC Navigation
A CHC Navigation (CHCNAV) desenvolve soluções avançadas de cartografia, navegação e posicionamento, concebidas para aumentar a produtividade e a eficiência. Servindo indústrias como a geoespacial, a agricultura, a construção e a autonomia, a CHCNAV fornece tecnologias inovadoras que capacitam os profissionais e impulsionam o avanço da indústria. Com uma presença global que abrange mais de 140 países e uma equipa de mais de 2.000 profissionais, a CHC Navigation é reconhecida como líder na indústria geoespacial e não só. Para mais informações sobre a CHC Navigation [Huace:300627.SZ], visite: www.chcnav.com