CHC Navigation Q&R avec Byron Yuan : La vision derrière l'innovation du CHCNAV RS10
2025-04-18
L'évolution du GNSS, du SLAM et du LiDAR dans la topographie
La recherche de données géospatiales précises a stimulé les progrès des technologies de positionnement et de cartographie, notamment les systèmes mondiaux de navigation par satellite(GNSS), la détection et la télémétrie par ondes lumineuses(LiDAR) et la localisation et la cartographie simultanées(SLAM).
Le GNSS, alimenté par des constellations telles que GPS (États-Unis), GLONASS (Russie), Galileo (UE) et BeiDou (Chine), a révolutionné le positionnement avec l'avènement des méthodes cinématiques en temps réel (RTK) dans les années 1990. Les corrections RTK ont considérablement amélioré la précision, réduisant les erreurs GNSS de quelques mètres à quelques centimètres et permettant une géolocalisation de haute précision en temps réel.
Entre-temps, le LiDAR est devenu un outil de télédétection mature qui utilise des impulsions laser pour créer des nuages de points à haute résolution. Sa capacité à capturer des détails topographiques complexes l'a rendu indispensable pour des applications telles que l'inspection des infrastructures et la gestion des forêts.
Le LiDAR peut capturer le monde réel avec des nuages de points
Développé à l'origine pour la robotique, le SLAM a ajouté une nouvelle dimension en permettant aux appareils de cartographier et de naviguer en temps réel dans des environnements inconnus. Les progrès réalisés dans le domaine des capteurs et de l'informatique ont permis d'étendre l'utilité du SLAM aux véhicules aériens sans pilote, à la navigation autonome et à la modélisation 3D.
Aujourd'hui, l'intégration de ces technologies transforme les flux de travail des géomètres. Des solutions telles que le RS10 de CHCNAV combinent le positionnement absolu du GNSS RTK, les capacités de cartographie dynamique du SLAM et la collecte de données riches du LiDAR.
Entretien avec Byron Yuan, directeur de CHCNAV 3D Mobile Mapping : La vision derrière le RS10
Byron Yuan, directeur des solutions de cartographie mobile 3D chez CHC Navigation, présente le RS10, un système innovant qui intègre les technologies GNSS et SLAM. Dans cette session de questions-réponses, il explore l'évolution du système, ses caractéristiques exceptionnelles et son potentiel futur. Il souligne également comment le RS10 répond aux défis critiques de la topographie et établit de nouvelles normes industrielles en matière d'efficacité et de précision.
Qu'est-ce que le RS10 et en quoi diffère-t-il des solutions GNSS traditionnelles ?
Le RS10 est un système de cartographie mobile 3D qui combine le GNSS RTK, le SLAM et le LiDAR dans une solution compacte et portable. Contrairement aux appareils GNSS traditionnels qui dépendent uniquement des signaux satellites pour le positionnement, le RS10 utilise le SLAM pour maintenir la précision dans les zones où les signaux GNSS sont limités ou inexistants, telles que les forêts, les canyons urbains et les espaces souterrains.
En intégrant ces technologies, le RS10 fournit une cartographie et un positionnement 3D fiables en temps réel. Cette polyvalence lui permet de s'adapter à un large éventail d'applications, notamment les enquêtes sur les chantiers de construction et les inspections d'infrastructures.
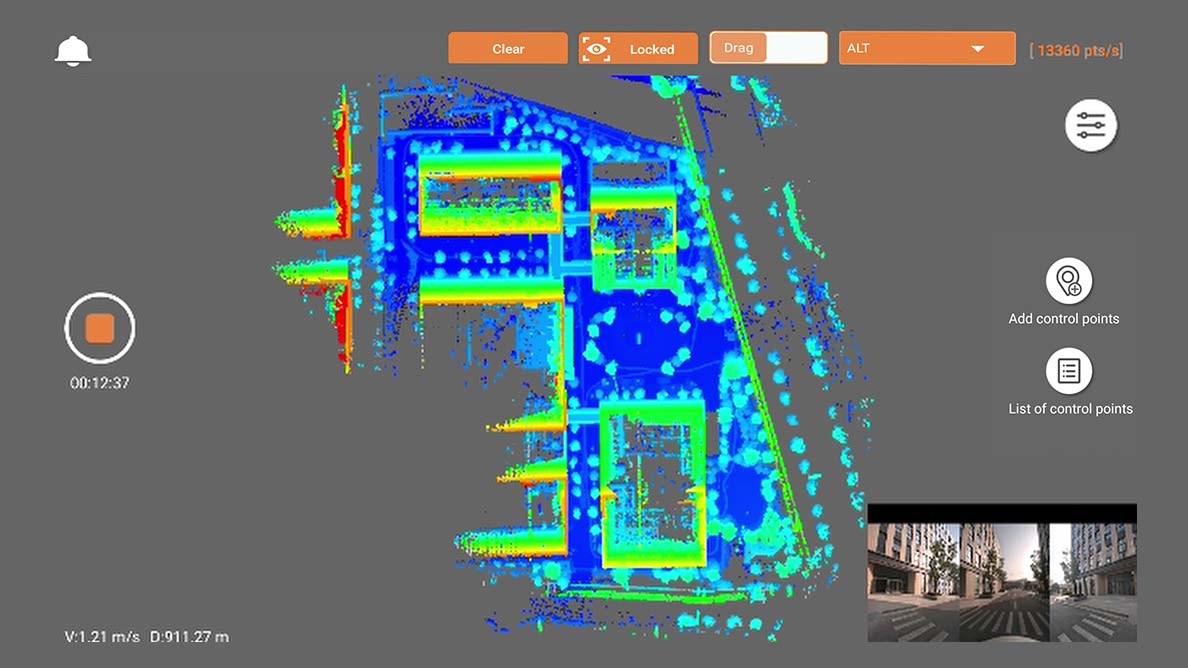
La visualisation des nuages de points en temps réel améliore l'efficacité de la numérisation
Qu'est-ce que la technologie SLAM et comment est-elle intégrée au GNSS RTK dans le RS10 ?
Byron Yuan: Le SLAM (Simultaneous Localization and Mapping) est une technologie qui utilise des capteurs tels que des caméras, des LiDAR et des systèmes de navigation inertielle pour observer et interpréter l'environnement tout en créant simultanément une carte. Elle joue un rôle clé dans des applications telles que la cartographie, la modélisation 3D et la navigation autonome, y compris l'évitement d'obstacles pour la robotique et les drones.
Dans le RS10, nous adoptons une approche unique en couplant étroitement les données brutes de mesure SLAM avec le GNSS RTK. Plutôt que de simplement combiner les résultats finaux du SLAM et du GNSS, cette approche intègre les données à un niveau plus profond. Reconnaissant la nature diverse et dynamique des environnements topographiques, le RS10 utilise un algorithme adaptatif pour ajuster la pondération des données SLAM et RTK en fonction des conditions environnementales. Cette approche garantit une précision de positionnement et des performances cartographiques optimales lorsque les conditions changent.
La fusion du GNSS et du SLAM présente des avantages uniques
Quels sont les avantages de cette intégration ?
Byron Yuan: Le RS10 exploite les forces des récepteurs GNSS et des scanners SLAM autonomes, offrant des avantages significatifs par rapport à chacun d'entre eux.
Avec les récepteurs GNSS, des problèmes tels que les erreurs de glissement de cycle - causées par des interférences de signal provenant d'obstacles tels que des arbres, des bâtiments ou le terrain - peuvent compromettre la précision du positionnement. Le RS10 résout ce problème en intégrant le SLAM, qui fournit des données de position stables dans les zones où les signaux GNSS sont faibles ou inexistants, ce qui garantit une efficacité et une fiabilité accrues des mesures dans les opérations quotidiennes.
Les scanners SLAM autonomes, en revanche, souffrent souvent d'erreurs de dérive cumulées, où les imprécisions augmentent au fur et à mesure que l'appareil se déplace dans l'environnement. Ces systèmes s'appuient généralement sur des points de contrôle ou des corrections externes pour maintenir la précision. Le RS10 surmonte cette limitation en intégrant le GNSS RTK, qui agit comme une référence en temps réel pour corriger les erreurs de dérive. Cela permet non seulement d'améliorer la précision des levés, mais aussi de réduire la nécessité d'un post-traitement approfondi.
En combinant ces technologies, le RS10 fournit un positionnement précis et une cartographie détaillée qui fonctionne efficacement dans les environnements compatibles avec le GNSS comme dans ceux qui en sont dépourvus.
Qu'est-ce qui a inspiré le développement du RS10 ?
Byron Yuan: Grâce à une étude de marché, nous avons identifié plusieurs points problématiques auxquels les géomètres sont généralement confrontés avec les scanners SLAM existants. Il s'agit notamment de la précision limitée dans les environnements complexes, de la dépendance à l'égard des trajectoires en boucle fermée pour la correction des erreurs et des écosystèmes qui manquent de convivialité. Ces défis ont mis en évidence la nécessité d'une solution spécifiquement conçue pour l'industrie de la topographie. C'est ce qui nous a incités à développer le RS10, un système qui intègre de manière transparente le GNSS de haute précision et la technologie SLAM afin de remédier à ces limitations.
La fonction Loop-Free élimine la nécessité de fermer les boucles.
Quels sont les défis auxquels vous avez été confrontés lors du développement du RS10 ?
Byron Yuan: Le plus grand défi a été d'atteindre la haute précision de mesure que nous visions - une précision absolue de 5 cm et une précision relative de 1 cm, quel que soit le scénario. Ces objectifs ambitieux ont nécessité des innovations et des efforts technologiques considérables.
Environ six mois après le début du projet, nous nous sommes demandé si ces objectifs étaient réalisables. Pour y remédier, nous avons adopté une approche de développement agile comprenant des méthodes de test itératives telles que celles utilisées par SpaceX. Cela a impliqué la construction de prototypes orientés vers le client dès le début du processus.
Notre premier prototype n'a pas atteint les objectifs de précision et a révélé des problèmes techniques critiques. Par exemple, le moteur qui entraîne la rotation du LiDAR - un élément clé pour maintenir une précision de balayage constante - a nécessité six itérations de conception sur une période d'un an avant de répondre aux normes de performance. Grâce à ces perfectionnements itératifs, nous avons progressivement résolu les problèmes techniques et finalement répondu aux exigences strictes en matière de précision.
Quelles sont les principales caractéristiques du RS10 que vous êtes le plus impatient de présenter ?
Byron Yuan: Deux des innovations les plus intéressantes du RS10 sont SFix et Vi-LiDAR, qui redéfinissent les approches traditionnelles du positionnement et de la mesure sans contact.
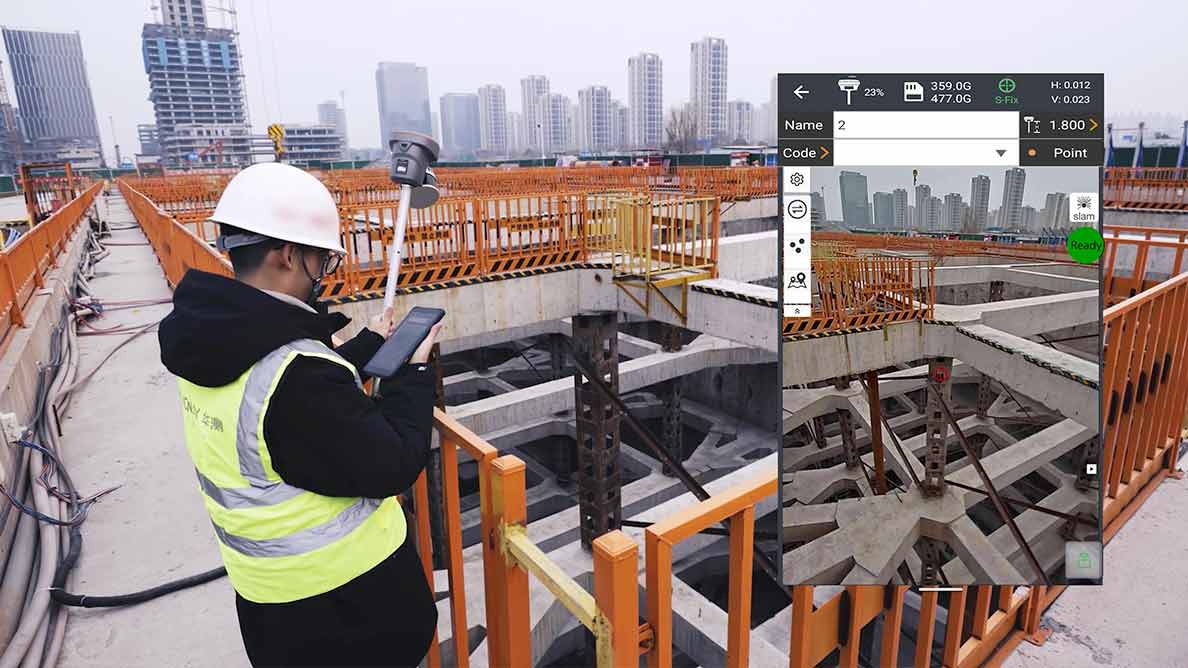
SFix s'appuie sur l'intégration étroite du GNSS et du SLAM pour offrir une précision de positionnement pouvant atteindre 5 cm en l'espace d'une minute, même dans des environnements où les signaux GNSS sont obstrués ou perturbés. Cette capacité rend le RS10 très polyvalent, permettant des applications telles que les enquêtes en intérieur, où les solutions traditionnelles basées sur le GNSS sont insuffisantes.
Au cours du processus de développement, nous avons cherché à révolutionner les processus de mesure sans contact utilisant le V-LiDAR en améliorant à la fois l'efficacité et la précision. Au départ, le concept consistait à utiliser le LiDAR pour capturer des coordonnées de points spécifiques sur le terrain, ce qui nécessitait un ciblage manuel.
Cependant, nous avons fait évoluer cette idée pour éliminer la nécessité d'une visée précise. Cette approche permet non seulement d'atténuer les erreurs causées par les tremblements de la main, mais aussi d'améliorer considérablement la fiabilité et l'efficacité, en particulier dans les zones complexes ou difficiles d'accès, transformant ainsi le processus de mesure sans contact.
Un géomètre utilise la fonction V-LiDAR
Comment le RS10 assure-t-il une numérisation efficace ?
Byron Yuan: La numérisation efficace est obtenue grâce à plusieurs innovations conçues pour améliorer les performances dans les applications du monde réel.
L'une des principales innovations est notre technologie Loop-Free, qui évite aux géomètres d'avoir à repasser dans les zones pour fermer les boucles. La trajectoire de balayage est ainsi optimisée, ce qui réduit la durée des levés sans sacrifier la précision des données. En outre, le RS10 est équipé de batteries remplaçables à chaud, ce qui permet un fonctionnement ininterrompu et des sessions de numérisation prolongées sans avoir à éteindre l'appareil.
Pour maintenir la fiabilité et la qualité des données, nous avons introduit la fonction Precision Alert. Intégrée au système de visualisation en temps réel du nuage de points du RS10, elle fournit un retour d'information immédiat sur la qualité des données. Les géomètres peuvent résoudre les problèmes potentiels lors de la numérisation initiale, ce qui minimise la nécessité de répéter les numérisations et garantit une capture de données de haute qualité dès le premier passage.
Quelle est, selon vous, l'orientation future de produits tels que le RS10 ?
Byron Yuan: La technologie SLAM devrait transformer la topographie en remplaçant les outils traditionnels tels que les stations totales et les récepteurs GNSS RTK dans un plus grand nombre de scénarios. Au fur et à mesure de son adoption, nous nous attendons à des avancées significatives dans les algorithmes SLAM afin d'améliorer la précision et la stabilité. Parallèlement, les solutions logicielles deviendront plus avancées et plus conviviales afin de mieux répondre aux divers besoins de l'industrie.
À l'avenir, l'intégration du SLAM aux technologies de modélisation visuelle et 3D améliorera encore les outils tels que le RS10. Par exemple, la combinaison du SLAM avec la modélisation gaussienne en 3D pourrait permettre la création de jumeaux numériques très réalistes qui fournissent des représentations détaillées et interactives d'environnements physiques. Ces innovations pourraient étendre les applications du SLAM à des domaines tels que le génie civil, l'urbanisme et la réalité virtuelle, créant ainsi de nouvelles possibilités d'efficacité et d'innovation.
L'innovation technologique du RS10 offre plus de possibilités aux géomètres.
Réflexions finales
Le RS10 incarne l'engagement de CHC Navigation à repousser les limites de la technologie géospatiale grâce à l'intégration transparente du GNSS, du SLAM et du LiDAR. Comme le souligne Byron Yuan, des innovations telles que SFix et Vi-LiDAR permettent de relever efficacement les défis de l'industrie et de garantir la précision dans des environnements difficiles. Grâce à ses capacités avancées, le RS10 redéfinit non seulement les flux de travail traditionnels des géomètres, mais il jette également les bases d'applications SLAM plus vastes, ouvrant de nouvelles possibilités en matière de modélisation 3D et de création de jumeaux numériques.
____
À propos de CHC Navigation
CHC Navigation (CHCNAV) développe des solutions avancées de cartographie, de navigation et de positionnement conçues pour accroître la productivité et l'efficacité. Au service d'industries telles que le géospatial, l'agriculture, la construction et l'autonomie, CHCNAV fournit des technologies innovantes qui permettent aux professionnels de se prendre en charge et de faire progresser l'industrie. Avec une présence mondiale dans plus de 140 pays et une équipe de plus de 2 000 professionnels, CHC Navigation est reconnue comme un leader dans l'industrie géospatiale et au-delà. Pour plus d'informations sur CHC Navigation [Huace:300627.SZ], veuillez consulter : www.chcnav.com