CHC Navigation - Fragen und Antworten mit Byron Yuan: Die Vision hinter der Innovation CHCNAV RS10
2025-04-18
Die Entwicklung von GNSS, SLAM und LiDAR im Vermessungswesen
Das Streben nach präzisen Geodaten hat zu Fortschritten in der Positionierungs- und Kartierungstechnologie geführt, darunter Global Navigation Satellite Systems(GNSS), Light Detection and Ranging(LiDAR) und Simultaneous Localization and Mapping(SLAM).
GNSS, das von Konstellationen wie GPS (USA), GLONASS (Russland), Galileo (EU) und BeiDou (China) betrieben wird, revolutionierte die Positionsbestimmung mit der Einführung der Echtzeit-Kinematik (RTK) in den 1990er Jahren. RTK-Korrekturen verbesserten die Genauigkeit drastisch, reduzierten die GNSS-Fehler von Metern auf Zentimeter und ermöglichten hochpräzise Geolokalisierung in Echtzeit.
Inzwischen hat sich LiDAR zu einem ausgereiften Fernerkundungsinstrument entwickelt, das mit Hilfe von Laserimpulsen hochauflösende Punktwolken erstellt. Seine Fähigkeit, komplizierte topografische Details zu erfassen, hat es für Anwendungen wie die Inspektion von Infrastrukturen und die Forstwirtschaft unverzichtbar gemacht.
LiDAR kann die reale Welt mit Punktwolken erfassen
Ursprünglich für die Robotik entwickelt, hat SLAM eine neue Dimension erreicht, indem es Geräten ermöglicht, unbekannte Umgebungen in Echtzeit zu kartieren und zu navigieren. Fortschritte bei Sensoren und Computern haben den Nutzen von SLAM auf unbemannte Luftfahrzeuge, autonome Navigation und 3D-Modellierung ausgeweitet.
Heute verändert die Integration dieser Technologien die Arbeitsabläufe in der Vermessung. Lösungen wie die RS10 von CHCNAV kombinieren die absolute Positionierung von GNSS RTK, die dynamischen Kartierungsfähigkeiten von SLAM und die umfangreiche Datenerfassung von LiDAR.
Interview mit Byron Yuan, Direktor von CHCNAV 3D Mobile Mapping: Die Vision hinter dem RS10
Byron Yuan, Director of 3D Mobile Mapping Solutions bei CHC Navigation, gibt einen Einblick in das innovative RS10, ein bahnbrechendes System, das GNSS- und SLAM-Technologien integriert. In dieser Frage-und-Antwort-Runde geht er auf die Entwicklung des Systems, seine herausragenden Merkmale und sein zukünftiges Potenzial ein. Er hebt auch hervor, wie der RS10 kritische Vermessungsherausforderungen angeht und neue Branchenstandards für Effizienz und Genauigkeit setzt.
Was ist der RS10, und wie unterscheidet er sich von herkömmlichen GNSS-Lösungen?
Der RS10 ist ein mobiles 3D-Kartierungssystem, das GNSS RTK, SLAM und LiDAR in einer kompakten und tragbaren Lösung kombiniert. Im Gegensatz zu herkömmlichen reinen GNSS-Geräten, die für die Positionierung ausschließlich auf Satellitensignale angewiesen sind, verwendet der RS10 SLAM, um die Genauigkeit in Bereichen mit begrenzten oder fehlenden GNSS-Signalen zu erhalten, z. B. in Wäldern, Straßenschluchten und unterirdischen Räumen.
Durch die Integration dieser Technologien bietet der RS10 zuverlässige 3D-Kartierung und Positionierung in Echtzeit. Dank dieser Vielseitigkeit eignet er sich für eine breite Palette von Anwendungen, einschließlich Baustellenvermessungen und Infrastrukturinspektionen.
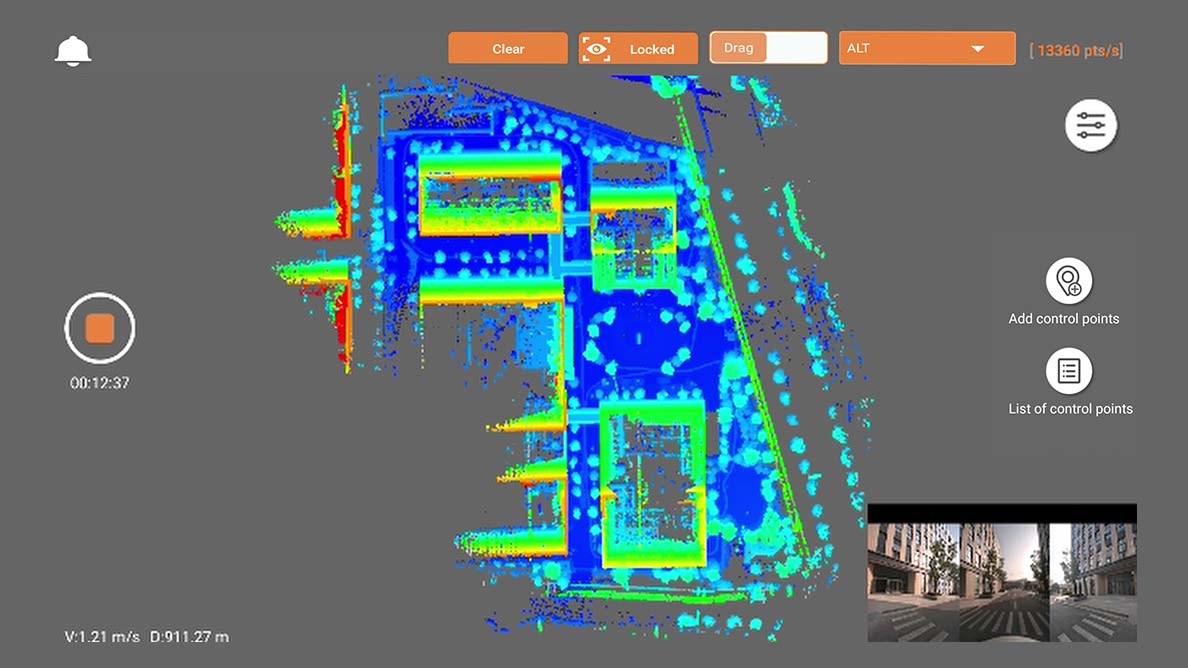
Die Anzeige von Punktwolken in Echtzeit sorgt für eine höhere Effizienz beim Scannen
Was ist die SLAM-Technologie, und wie ist sie mit GNSS RTK in den RS10 integriert?
Byron Yuan: SLAM (Simultaneous Localization and Mapping) ist eine Technologie, die Sensoren wie Kameras, LiDAR und Trägheitsnavigationssysteme nutzt, um die Umgebung zu beobachten und zu interpretieren und gleichzeitig eine Karte zu erstellen. Sie spielt eine Schlüsselrolle bei Anwendungen wie Kartierung, 3D-Modellierung und autonomer Navigation, einschließlich Hindernisvermeidung für Roboter und Drohnen.
Beim RS10 verfolgen wir einen einzigartigen Ansatz, indem wir die rohen SLAM-Messdaten eng mit GNSS RTK koppeln. Anstatt einfach nur die endgültigen Ergebnisse von SLAM und GNSS zu kombinieren, integriert dieser Ansatz die Daten auf einer tieferen Ebene. In Anbetracht der vielfältigen und dynamischen Natur von Vermessungsumgebungen verwendet der RS10 einen adaptiven Algorithmus, um die Gewichtung von SLAM- und RTK-Daten je nach Umgebungsbedingungen anzupassen. Dieser Ansatz gewährleistet eine optimale Positionierungsgenauigkeit und Kartierungsleistung bei sich ändernden Bedingungen.
Die Fusion von GNSS und SLAM bietet einzigartige Vorteile
Was sind die Vorteile dieser Integration?
Byron Yuan: Der RS10 nutzt die Stärken sowohl von GNSS-Empfängern als auch von eigenständigen SLAM-Scannern und bietet gegenüber beiden erhebliche Vorteile.
Bei GNSS-Empfängern können Probleme wie Zyklusschlupffehler - verursacht durch Signalstörungen durch Hindernisse wie Bäume, Gebäude oder Gelände - die Positionsgenauigkeit beeinträchtigen. Der RS10 löst dieses Problem durch die Integration von SLAM, das stabile Positionsdaten in Bereichen mit schwachen oder gar keinen GNSS-Signalen liefert und so eine höhere Messeffizienz und Zuverlässigkeit im täglichen Betrieb gewährleistet.
Eigenständige SLAM-Scanner hingegen leiden oft unter kumulativen Driftfehlern, bei denen die Ungenauigkeiten mit der Bewegung des Geräts durch die Umgebung zunehmen. Diese Systeme sind in der Regel auf Kontrollpunkte oder externe Korrekturen angewiesen, um die Genauigkeit zu erhalten. Der RS10 überwindet diese Einschränkung durch die Integration von GNSS RTK, das als Echtzeitreferenz zur Korrektur von Driftfehlern dient. Dies verbessert nicht nur die Vermessungsgenauigkeit, sondern reduziert auch die Notwendigkeit einer umfangreichen Nachbearbeitung.
Durch die Kombination dieser Technologien liefert der RS10 eine präzise Positionierung und detaillierte Kartierung, die sowohl in GNSS-freundlichen als auch in GNSS-schwachen Umgebungen effektiv funktioniert.
Was war der Auslöser für die Entwicklung des RS10?
Byron Yuan: Im Rahmen unserer Marktforschung haben wir mehrere Probleme identifiziert, mit denen Vermessungsingenieure bei bestehenden SLAM-Scannern häufig konfrontiert sind. Dazu gehörten die begrenzte Genauigkeit in komplexen Umgebungen, die Abhängigkeit von geschlossenen Pfaden für die Fehlerkorrektur und die mangelnde Benutzerfreundlichkeit der Ökosysteme. Diese Herausforderungen unterstrichen den Bedarf an einer Lösung, die speziell für die Vermessungsbranche entwickelt wurde. Dies hat uns dazu inspiriert, den RS10 zu entwickeln, ein System, das hochpräzises GNSS nahtlos mit SLAM-Technologie integriert, um diese Einschränkungen zu beseitigen.
Die Loop-Free-Funktion macht einen Schlaufenverschluss überflüssig
Vor welchen Herausforderungen standen Sie bei der Entwicklung des RS10?
Byron Yuan: Die größte Herausforderung bestand darin, die von uns angestrebte hohe Messgenauigkeit zu erreichen - eine absolute Genauigkeit von 5 cm und eine relative Genauigkeit von 1 cm, unabhängig vom jeweiligen Szenario. Diese ehrgeizigen Ziele erforderten erhebliche Innovationen und technologische Anstrengungen.
Etwa sechs Monate nach Beginn des Projekts wurden wir unsicher, ob diese Ziele erreichbar waren. Um dies zu überwinden, wählten wir einen agilen Entwicklungsansatz mit iterativen Testmethoden, wie sie auch von SpaceX verwendet werden. Dazu gehörte auch die Erstellung von kundenorientierten Prototypen in einem frühen Stadium des Prozesses.
Unser erster Prototyp verfehlte die Genauigkeitsziele und offenbarte kritische technische Probleme. So musste beispielsweise der Motor, der die LiDAR-Rotation antreibt - eine Schlüsselkomponente für eine gleichbleibende Scan-Genauigkeit - im Laufe eines Jahres sechs Mal überarbeitet werden, bevor er den Leistungsstandards entsprach. Durch diese iterativen Verfeinerungen konnten wir nach und nach die technischen Herausforderungen lösen und schließlich die strengen Genauigkeitsanforderungen erfüllen.
Was sind die wichtigsten Merkmale der RS10, auf die Sie sich am meisten freuen?
Byron Yuan: Zwei der aufregendsten Innovationen des RS10 sind SFix und Vi-LiDAR, die traditionelle Ansätze zur Positionierung und berührungslosen Messung neu definieren.
SFix nutzt die enge Integration von GNSS und SLAM, um eine Positionsgenauigkeit von bis zu 5 cm innerhalb einer Minute zu erreichen, selbst in Umgebungen mit behinderten oder gestörten GNSS-Signalen. Diese Fähigkeit macht den RS10 äußerst vielseitig und ermöglicht Anwendungen wie Vermessungen in Innenräumen, bei denen herkömmliche, nur auf GNSS basierende Lösungen versagen.
Während des Entwicklungsprozesses war es unser Ziel, die Arbeitsabläufe bei berührungslosen Messungen mit V-LiDAR zu revolutionieren, indem wir sowohl die Effizienz als auch die Genauigkeit verbessern. Ursprünglich konzentrierte sich das Konzept auf den Einsatz von LiDAR zur Erfassung bestimmter Punktkoordinaten im Feld, was eine manuelle Zielerfassung erforderte.
Wir haben diese Idee jedoch weiterentwickelt, um die Notwendigkeit einer präzisen Zielerfassung zu eliminieren. Mit dem RS10 wird ein innovativer Arbeitsablauf eingeführt, bei dem Vermessungsfachleute einfach ein Bild der Umgebung aufnehmen und direkt Messpunkte darauf auswählen können. Dieser Ansatz verringert nicht nur Fehler, die durch das Zittern der Hände verursacht werden, sondern verbessert auch die Zuverlässigkeit und Effizienz erheblich, insbesondere in komplexen oder schwer zugänglichen Vermessungsgebieten, und verändert den berührungslosen Messprozess.
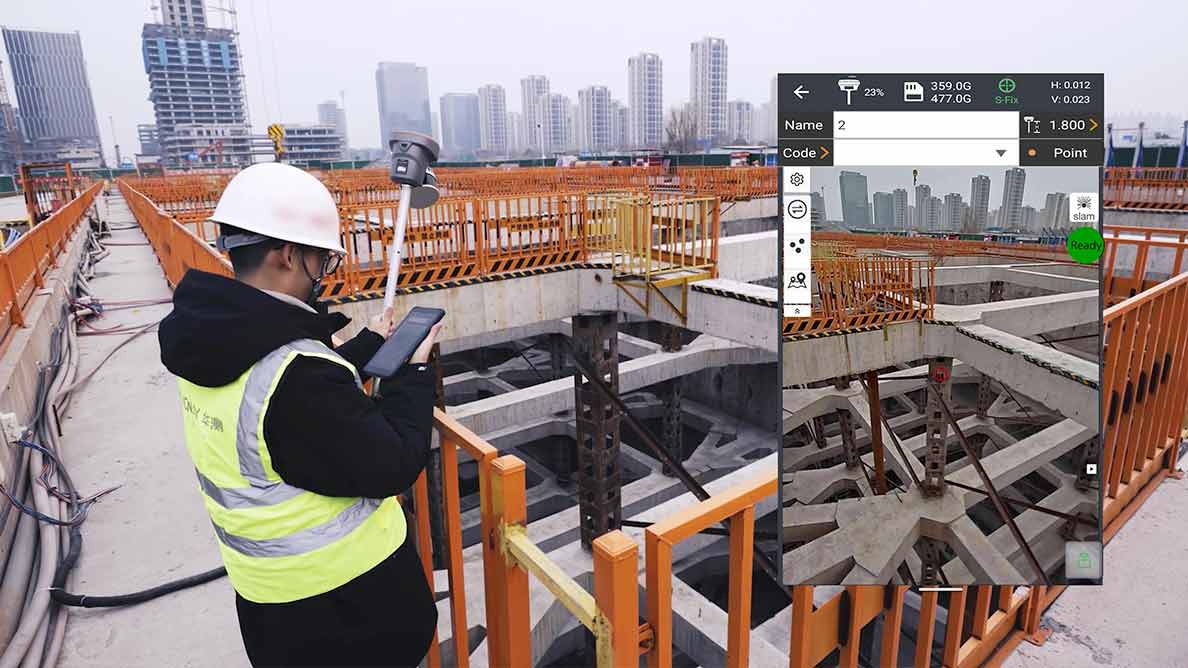
Ein Vermessungsingenieur verwendet die V-LiDAR-Funktion
Wie gewährleistet der RS10 effizientes Scannen?
Byron Yuan: Effizientes Scannen wird durch mehrere Innovationen erreicht, die die Leistung in realen Anwendungen verbessern sollen.
Eine Schlüsselinnovation ist unsere Loop-Free-Technologie, die es den Vermessungsingenieuren erspart, Bereiche erneut aufzusuchen, um Schleifen zu schließen. Dadurch wird der Scanpfad optimiert und die Vermessungszeit verkürzt, ohne die Datengenauigkeit zu beeinträchtigen. Darüber hinaus verfügt der RS10 über im laufenden Betrieb austauschbare Batterien, die einen unterbrechungsfreien Betrieb und längere Scansitzungen ermöglichen, ohne das Gerät auszuschalten.
Um die Zuverlässigkeit und Qualität der Daten zu gewährleisten, haben wir die Funktion Precision Alert eingeführt. Sie ist in das Echtzeit-Punktwolken-Anzeigesystem des RS10 integriert und liefert sofortiges Feedback zur Datenqualität. Vermessungsingenieure können potenzielle Probleme bereits während des ersten Scans angehen, wodurch die Notwendigkeit von Wiederholungsscans minimiert und eine hochwertige Datenerfassung beim ersten Durchgang sichergestellt wird.
Wie sehen Sie die zukünftige Entwicklung von Produkten wie dem RS10?
Byron Yuan: Die SLAM-Technologie wird das Vermessungswesen verändern, indem sie herkömmliche Instrumente wie Totalstationen und GNSS-RTK-Empfänger in immer mehr Szenarien ersetzen wird. Mit der zunehmenden Verbreitung erwarten wir erhebliche Fortschritte bei den SLAM-Algorithmen zur Verbesserung der Genauigkeit und Stabilität. Gleichzeitig werden die Softwarelösungen immer fortschrittlicher und benutzerfreundlicher, um den unterschiedlichen Anforderungen der Branche besser gerecht zu werden.
In Zukunft wird die Integration von SLAM mit visuellen und 3D-Modellierungstechnologien Werkzeuge wie den RS10 weiter verbessern. So könnte die Kombination von SLAM mit der 3D-Gauß-Modellierung die Erstellung äußerst realistischer digitaler Zwillinge ermöglichen, die detaillierte, interaktive Darstellungen physischer Umgebungen liefern. Diese Innovationen könnten die Anwendungsmöglichkeiten von SLAM auf Bereiche wie Bauwesen, Stadtplanung und virtuelle Realität ausweiten und neue Möglichkeiten für Effizienz und Innovation schaffen.
Die technologische Innovation des RS10 bietet dem Vermesser mehr Möglichkeiten
Abschließende Überlegungen
Der RS10 verkörpert das Engagement von CHC Navigation, durch die nahtlose Integration von GNSS, SLAM und LiDAR die Grenzen der Geodaten-Technologie zu erweitern. Byron Yuan betont, dass Innovationen wie SFix und Vi-LiDAR die Herausforderungen der Branche effektiv angehen und Genauigkeit in schwierigen Umgebungen liefern. Mit seinen fortschrittlichen Funktionen definiert der RS10 nicht nur die traditionellen Vermessungsabläufe neu, sondern legt auch den Grundstein für breitere SLAM-Anwendungen, die neue Möglichkeiten für die 3D-Modellierung und die Erstellung digitaler Zwillinge eröffnen.
____
Über CHC Navigation
CHC Navigation (CHCNAV) entwickelt fortschrittliche Kartierungs-, Navigations- und Positionierungslösungen, die die Produktivität und Effizienz steigern. CHCNAV beliefert Branchen wie Geodaten, Landwirtschaft, Bauwesen und Autonomie und liefert innovative Technologien, die Fachleute befähigen und den Fortschritt in der Branche vorantreiben. Mit einer weltweiten Präsenz in über 140 Ländern und einem Team von mehr als 2.000 Fachleuten ist CHC Navigation als führend in der Geospatial-Industrie und darüber hinaus anerkannt. Weitere Informationen über CHC Navigation [Huace:300627.SZ] finden Sie unter: www.chcnav.com