測量におけるGNSS、SLAM、LiDARの進化
正確な地理空間 データの追求は、全地球航法衛星システム(GNSS) 、光検出と測距(LiDAR) 、同時定位とマッピング(SLAM )などの測位とマッピング技術の進歩に拍車をかけた。
GPS(米国)、GLONASS(ロシア)、Galileo(EU)、BeiDou(中国)などのコンステレーションを搭載したGNSSは、1990年代のリアルタイム・キネマティック(RTK)方式の登場によって測位に革命をもたらしました。RTK補正は精度を劇的に向上させ、GNSSの誤差をメートルからセンチメートルに減らし、リアルタイムで高精度のジオロケーションを可能にした。
一方、LiDARは、レーザーパルスを使用して高解像度の点群を作成する成熟したリモートセンシングツールへと進化した。複雑な地形の詳細をとらえることができるため、インフラ検査や森林管理などの用途に欠かせないものとなっている。
LiDARは点群によって現実世界を捉えることができる
もともとはロボット工学のために開発されたSLAMは、デバイスがリアルタイムで不慣れな環境をマッピングし、ナビゲートすることを可能にすることで、新たな次元をもたらした。センサーとコンピューティングの進歩により、SLAMの有用性は無人航空機、自律ナビゲーション、3Dモデリングにまで拡大した。
今日、これらの技術の統合は、測量ワークフローに変革をもたらしつつある。CHCNAVのRS10の ようなソリューションは、GNSS RTKの絶対測位、SLAMのダイナミックマッピング機能、LiDARの豊富なデータ収集を兼ね備えています。
CHCNAV 3Dモバイルマッピングのディレクター、バイロン・ユアンにインタビュー:RS10を支えるビジョン
CHCナビゲーションの3Dモバイルマッピングソリューション担当ディレクターであるバイロン・ユアンが、GNSSとSLAM技術を統合した先駆的なシステムである革新的なRS10について解説します。このQ&Aセッションでは、システムの進化、優れた機能、将来の可能性について説明します。また、RS10が測量における重要な課題にどのように対応し、効率性と精度において新たな業界標準を打ち立てているのかを紹介します。
RS10とは何ですか?また、従来のGNSSソリューションとの違いは何ですか?
RS10は、GNSS RTK、SLAM、LiDARをコンパクトでポータブルなソリューションに統合した3Dモバイルマッピングシステムです。衛星信号のみに頼って測位を行う従来のGNSS専用機とは異なり、RS10はSLAMを使用することで、森林、都市部の峡谷、地下空間など、GNSS信号が限られている、または全くない場所でも精度を維持することができます。
これらの技術を統合することで、RS10は信頼性の高いリアルタイムの3Dマッピングと測位を提供します。この汎用性により、建設現場調査やインフラ検査など、幅広い用途に適しています。
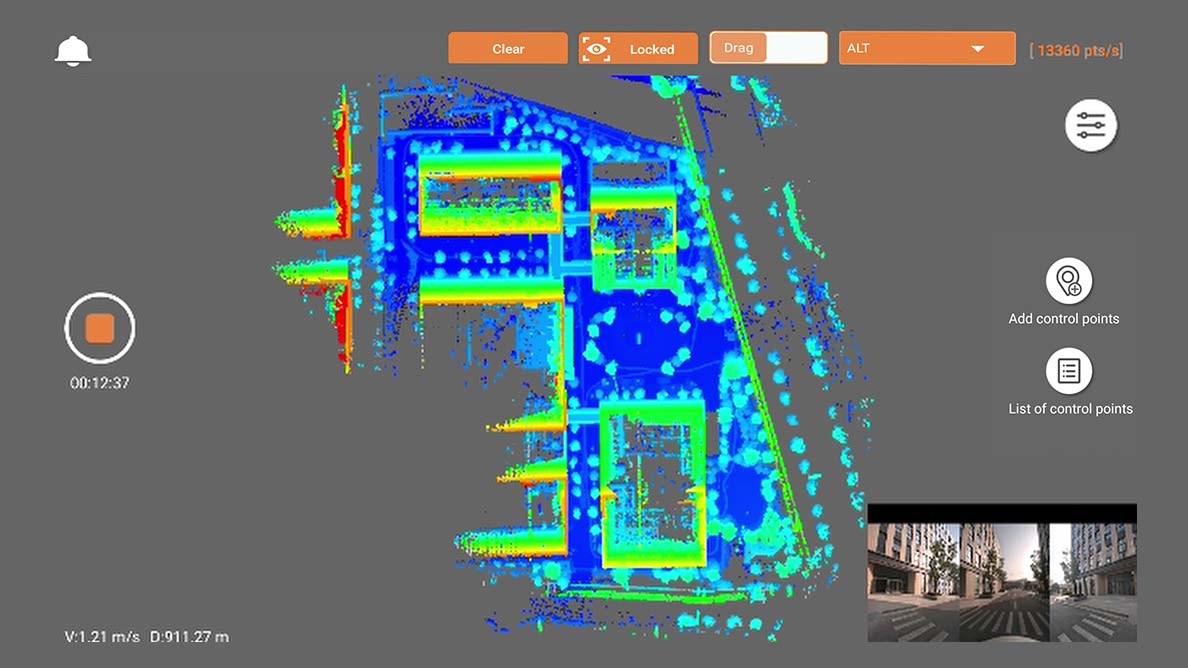
リアルタイムの点群表示でスキャン効率が向上
SLAM技術とは何ですか?また、RS10のGNSS RTKとどのように統合されていますか?
バイロン・ユアン SLAM(Simultaneous Localization and Mapping)は、カメラ、LiDAR、慣性航法システムなどのセンサーを使い、環境を観察・解釈すると同時に地図を作成する技術である。マッピング、3Dモデリング、ロボットやドローンの障害物回避を含む自律航法などのアプリケーションで重要な役割を果たしている。
RS10では、生のSLAM測定データをGNSS RTKと緊密に結合させることで、独自のアプローチをとっています。SLAMとGNSSの最終出力を単純に組み合わせるのではなく、このアプローチはより深いレベルでデータを統合します。RS10は、測量環境の多様性と動的な性質を認識し、環境条件に基づいてSLAMとRTKデータの重み付けを調整する適応アルゴリズムを使用しています。このアプローチにより、状況の変化に応じて最適な測位精度とマッピング性能を確保します。
GNSSとSLAMの融合には独自の利点がある
この統合の利点は?
バイロン・ユアン RS10は、GNSSレシーバーとスタンドアロンSLAMスキャナーの両方の長所を活かし、それぞれに大きな利点を提供しています。
GNSS受信機では、木々や建物、地形などの障害物による信号干渉によって生じるサイクルスリップエラーなどの問題によって、測位精度が損なわれることがあります。RS10はSLAMを搭載することでこの問題に対処し、GNSS信号が弱い、あるいは全くない場所でも安定した位置データを提供することで、日常業務における測定効率と信頼性を高めています。
一方、スタンドアローンのSLAMスキャナーは、しばしば累積ドリフトエラーに悩まされます。これらのシステムは通常、精度を維持するためにコントロールポイントや外部補正に依存しています。RS10は、ドリフト誤差を補正するリアルタイム基準として機能するGNSS RTKを統合することで、この制限を克服しています。これにより、測量精度が向上するだけでなく、大規模な後処理の必要性も軽減されます。
これらの技術を組み合わせることで、RS10は、GNSSに適した環境でも、GNSSが困難な環境でも効果的に機能する正確な位置決めと詳細なマッピングを実現します。
RS10開発のきっかけは?
Byron Yuan(以下BY ):市場調査を通じて、私たちは既存のSLAMスキャナーで測量士が共通して直面するいくつかの問題点を特定しました。複雑な環境では精度に限界があること、エラー補正を閉ループ経路に依存していること、使い勝手の悪いエコシステムなどです。これらの課題から、測量業界向けに特別に設計されたソリューションの必要性が浮き彫りになりました。RS10は、高精度GNSSとSLAM技術をシームレスに統合したシステムで、このような制約を解決するために開発されました。
ループフリー機能により、ループ留め不要
RS10の開発ではどのような問題に直面しましたか?
バイロン・ユアン :最大の課題は、私たちが目指した高い測定精度、つまりシナリオに関係なく、絶対精度5cm、相対精度1cmを達成することでした。こうした野心的な目標を達成するためには、大きな技術革新と技術的努力が必要でした。
プロジェクト開始から約半年が経過した頃、これらの目標が達成可能かどうかという不確実性に遭遇した。これを克服するため、私たちはスペースX社が採用しているような反復テスト手法を含むアジャイル開発アプローチを採用しました。これには、プロセスの早い段階で顧客向けのプロトタイプを作ることも含まれました。
最初のプロトタイプは精度目標に届かず、エンジニアリング上の重大な問題が明らかになりました。例えば、LiDARの回転を駆動するモーターは、一貫したスキャン精度を維持するための重要なコンポーネントですが、性能基準を満たすまでには1年以上かけて6回の設計の繰り返しが必要でした。このような改良を繰り返しながら、技術的な課題を徐々に解決し、最終的には厳しい精度要件を満たすことができました。
RS10の主な特徴のうち、最も期待しているものは何ですか?
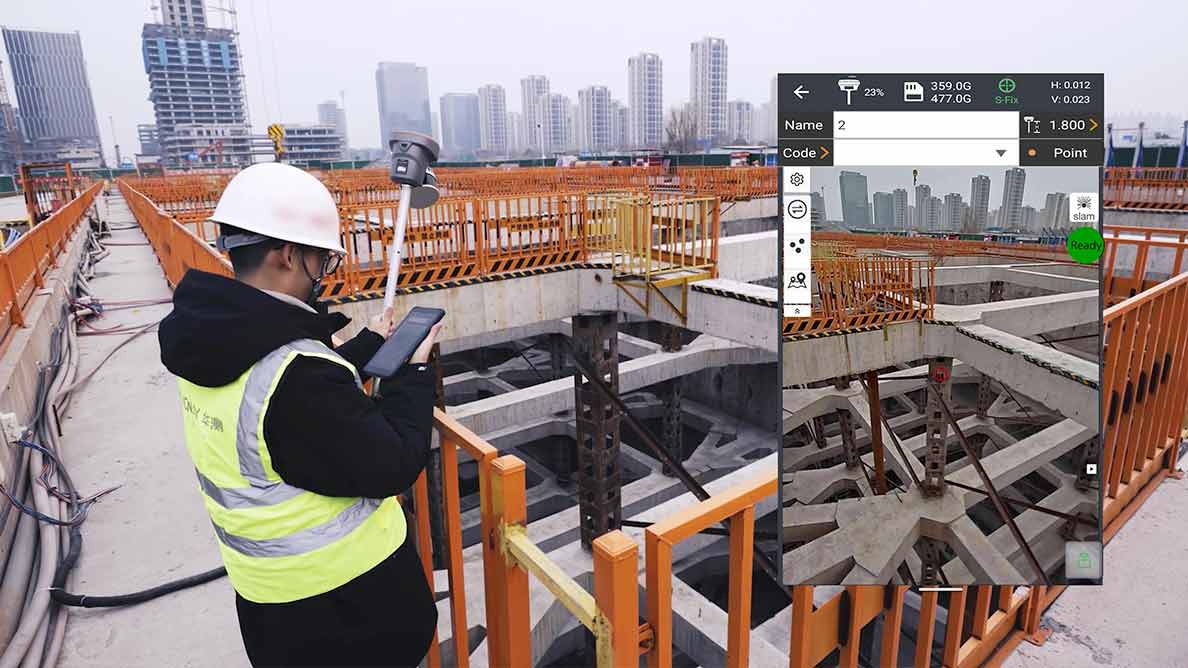
バイロン・ユアン :RS10で最もエキサイティングなイノベーションの2つはSFixとVi-LiDARで、従来の位置決めや非接触計測のアプローチを再定義するものです。
SFixはGNSSとSLAMの緊密な統合を活用し、GNSS信号が妨害されたり干渉されたりする環境でも、1分以内に最大5cmの位置精度を実現します。この機能により、RS10は汎用性が高く、従来のGNSSのみのソリューションでは不十分であった屋内調査などのアプリケーションを可能にします。
開発プロセスでは、効率と精度の両方を向上させることで、V-LiDARを使用した非接触測定ワークフローに革命を起こすことを目指しました。当初は、現場で特定のポイント座標を取得するためにLiDARを採用することがコンセプトの中心でしたが、これには手作業によるターゲティングが必要でした。
しかし、私たちはこのアイデアを進化させ、正確な照準の必要性をなくしました。このアプローチは、手の震えによる誤差を軽減するだけでなく、特に複雑な測量エリアやアクセスが困難な測量エリアでの信頼性と効率を大幅に向上させ、非接触測定プロセスを変革します。
測量士がV-LiDAR機能を使用しているところ
RS10はどのようにして効率的なスキャンを実現するのですか?
バイロン・ユアン :効率的なスキャンは、実世界のアプリケーションでパフォーマンスを向上させるために考案されたいくつかの工夫によって実現されています。
重要なイノベーションのひとつがループフリー・テクノロジーで、ループを閉じるために測量士がエリアを再訪する必要がありません。これによりスキャン経路が最適化され、データの精度を犠牲にすることなく、測量時間を短縮することができます。さらに、RS10はホットスワップ可能なバッテリーを搭載しており、デバイスの電源を落とすことなく、中断のない操作と長時間のスキャンセッションが可能です。
データの信頼性と品質を維持するために、プレシジョンアラート機能を導入しました。RS10のリアルタイム点群表示システムに統合され、データの品質に関するフィードバックを即座に提供します。測量士は最初のスキャン中に潜在的な問題に対処することができ、繰り返しスキャンの必要性を最小限に抑え、最初のパスで高品質なデータを確実に取得することができます。
RS10のような製品の今後の方向性をどのように考えていますか?
Byron Yuan :SLAMテクノロジーは、トータルステーションやGNSS RTKレシーバーといった従来のツールに取って代わり、より多くの場面で測量に変革をもたらすでしょう。導入が進むにつれ、SLAMアルゴリズムの大幅な進歩により、精度と安定性の向上が期待されます。同時に、ソフトウェアソリューションもより高度でユーザーフレンドリーなものになり、多様な業界のニーズに対応できるようになるでしょう。
今後、SLAMとビジュアルおよび3Dモデリング技術の統合により、RS10のようなツールはさらに強化されるでしょう。例えば、SLAMと3Dガウスモデリングを組み合わせることで、物理的な環境を詳細かつインタラクティブに表現する、非常にリアルなデジタルツインの作成が可能になります。このような技術革新により、SLAMの用途が土木工学、都市計画、バーチャルリアリティなどの分野に拡大し、効率性と革新性のための新たな機会が生まれる可能性がある。
RS10の技術革新が測量士にさらなる可能性をもたらす
結びの言葉
RS10は、GNSS、SLAM、LiDARのシームレスな統合を通じて、地理空間技術の限界を押し広げるというCHC Navigationのコミットメントを体現しています。バイロン・ユアン氏が指摘するように、SFixやVi-LiDARなどのイノベーションは、業界の課題に効果的に対処し、厳しい環境でも精度を実現します。その高度な機能により、RS10は従来の測量ワークフローを再定義するだけでなく、より広範なSLAMアプリケーションの基礎を築き、3Dモデリングやデジタルツイン作成に新たな可能性を開きます。
____
CHC Navigationについて
CHC Navigation (CHCNAV) は、生産性と効率性の向上を目的とした先進的なマッピング、ナビゲーション、ポジショニングソリューションを開発しています。CHCNAVは、地理空間、農業、建設、自治などの業界にサービスを提供し、プロフェッショナルに力を与え、業界の進歩を促進する革新的な技術を提供しています。世界140カ国以上で事業を展開し、2,000人以上のプロフェッショナルを擁するCHCナビゲーションは、地理空間業界のみならず、世界のリーダーとして認められています。CHCナビゲーション[Huace:300627.SZ]の詳細については、www.chcnav.com 。