Optimiser les relevés intérieurs avec un flux de travail plus intelligent : numérisation avec le scanner SLAM portable CHCNAV RS7
2026-04-10
Les projets de rénovation intérieure et d’aménagement ne rencontrent généralement pas leurs principales difficultés au moment de la prise de mesures. Les écarts apparaissent plus souvent en aval, lorsque des relevés incomplets, des croquis fragmentés et un manque de contexte spatial commencent à compromettre les choix de dessin, la coordination entre intervenants et la qualité des décisions de conception. C’est dans cette phase critique que la numérisation SLAM portable révèle pleinement sa valeur.
Conçu pour les applications de construction et de relevé intérieur, le scanner portable SLAM RS7 de CHC Navigation aide les équipes à capturer rapidement des données 3D de haute densité et à les convertir en livrables directement exploitables. Grâce à la technologie SLAM, pour Simultaneous Localization and Mapping, le RS7 suit sa propre trajectoire tout en générant un nuage de points 3D en temps réel, sans dépendre du GNSS ni de cibles préinstallées. Le résultat est un flux de travail plus rapide, plus cohérent et mieux adapté aux exigences des projets intérieurs, où la précision, la réactivité et la réutilisation des données deviennent essentielles.
Le changement de flux de travail : Des mesures isolées à un enregistrement spatial réutilisable
Les flux de travail traditionnels des relevés intérieurs suivent un schéma bien connu. Une équipe se rend sur site avec des mètres rubans, des télémètres laser et des blocs-notes. Elle relève les dimensions, esquisse des plans et photographie les principaux détails. Elle repart ensuite avec des mesures qui doivent être interprétées, redessinées et vérifiées à partir de croquis parfois incomplets ou imprécis. Lorsqu’une cote manque ou qu’une liaison entre deux pièces reste incertaine, une nouvelle visite sur site devient nécessaire.
Un scanner LiDAR portable transforme profondément cette approche. Au lieu de collecter des mesures isolées, l’opérateur parcourt l’espace et capture un nuage de points 3D continu et dense. Le résultat n’est plus une série de valeurs à reconstituer par la suite, mais un enregistrement spatial exploitable pour produire des plans d’étage, des coupes, des élévations, des modèles BIM, des études de conception et des vérifications ultérieures, à partir d’un seul et même jeu de données.
La question centrale n’est alors plus : « Avons-nous mesuré suffisamment ? », mais plutôt : « Comment pouvons-nous exploiter les données capturées ? » Une simple visite de site devient ainsi la création d’un actif 3D réutilisable, et non plus un simple exercice de mesure ponctuel.
Le CHCNAV RS7 capture en continu des données de nuages de points 3D pendant que l'opérateur se déplace dans les espaces intérieurs, remplaçant ainsi les mesures manuelles par un enregistrement spatial réutilisable.
Comment le scanner portable RS7 relève les défis de la numérisation en intérieur
Suivi stable en environnements à faible densité de caractéristiques
La qualité d’une numérisation 3D en intérieur repose en grande partie sur la stabilité de la trajectoire. Le scanner doit pouvoir suivre avec précision sa propre position tout au long du parcours dans le bâtiment. Cette opération est généralement simple dans des espaces riches en repères géométriques, en mobilier ou en détails architecturaux. Elle devient plus exigeante dans les couloirs, les cages d’escalier, les passages techniques ou les environnements répétitifs, où les points de référence utiles au SLAM sont plus limités.
Le CHCNAV RS7 rurmonte cette difficulté en fusionnant le système de navigation inertielle et le traitement SLAM, avec une IMU de haute précision offrant une instabilité de biais inférieure à 0,5 degré par heure. Il maintient ainsi une trajectoire stable même dans les espaces les plus répétitifs, pour générer des nuages de points plus propres, plus cohérents et avec moins d’erreurs d’alignement.
Capturer la géométrie intérieure en moins de temps
En capture de la réalité intérieure, la vitesse n’a de valeur que si elle s’accompagne d’une couverture complète. Des plafonds partiellement relevés, des structures en hauteur omises ou des angles mal capturés créent des vides dans le jeu de données, qui se traduisent ensuite par des retours sur site, des incertitudes dans les plans ou des arbitrages approximatifs au moment de la conception. Le scanner laser RS7 répond à cet enjeu en capturant jusqu’à 1,15 million de points par seconde, avec un champ de vision ultra-large de 360 × 189 degrés. Cette couverture quasi sphérique permet d’enregistrer naturellement les plafonds, les angles et les éléments en hauteur au fil du déplacement de l’opérateur, sans interruption du parcours ni repositionnement constant de l’instrument.
Sur le terrain, cette approche améliore aussi l’expérience d’utilisation. L’opérateur limite les changements de posture, réduit les interruptions dans sa trajectoire de numérisation et conserve un flux de travail plus continu. Le résultat est double : une capture plus homogène et plus complète, ainsi qu’un meilleur confort lors des sessions prolongées.
De la géométrie aux livrables visuels
La géométrie brute constitue une base indispensable, mais de nombreux intervenants ont également besoin d’un contexte visuel clair pour interpréter correctement les conditions existantes. Grâce à ses deux caméras HD de 12 MP intégrant la technologie Sony binning, le scanner portatif RS7 capture des images de haute qualité, même dans des environnements intérieurs faiblement éclairés. Cette imagerie alimente à la fois les nuages de points colorisés et le 3D Gaussian Splatting (3DGS) via le moteur de rendu HPGS 2.0, afin de produire des représentations visuelles photoréalistes en complément des données géométriques.
Cette couche visuelle renforce considérablement l’exploitabilité des données. Elle permet aux équipes d’examiner les finitions, les ouvertures, les équipements et les zones de circulation sans devoir retourner sur site. Dans le cadre des projets de rénovation, où la communication précise des conditions existantes est essentielle pour les concepteurs comme pour les entreprises d’exécution, la combinaison de la géométrie et du contexte visuel apporte une valeur opérationnelle particulièrement forte.
Du terrain au bureau : Un processus de traitement connecté
La qualité d’un relevé ne repose pas uniquement sur la capture terrain, mais sur la capacité à transformer rapidement les données en livrables exploitables. Le scanner laser avec imagerie RS7 s’inscrit dans un flux de traitement structuré et cohérent, couvrant l’ensemble du processus, de l’acquisition au produit final :
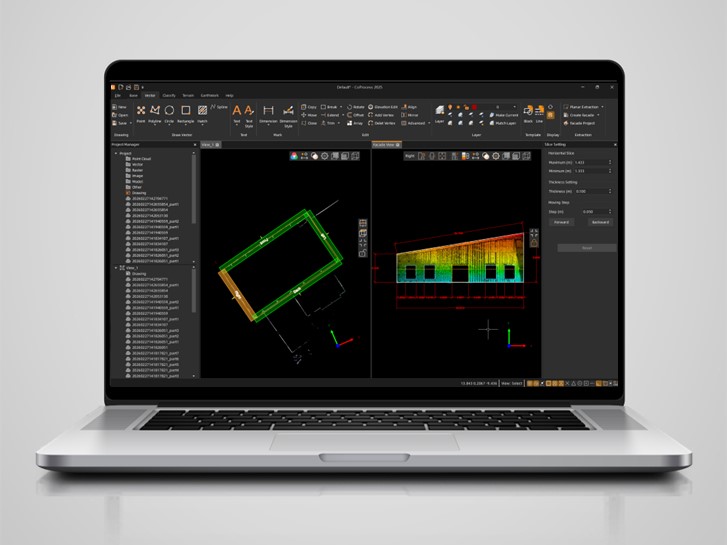
Planification des trajectoires et acquisition des données : le logiciel SmartGo pilote la collecte et fournit un aperçu en temps réel du nuage de points sur le terrain, permettant aux opérateurs de vérifier la couverture et la qualité des données avant de quitter le site.
Optimisation des données :CoPre et CoCloud assurent l’optimisation des nuages de points, le géoréférencement, la colorisation et le filtrage, afin de préparer efficacement les données pour les étapes suivantes.
Vectorisation des données :CoProcess 2025 aprend en charge la gestion des nuages de points, l’extraction des caractéristiques et la génération de livrables CAO aux formats .dwg et .dxf, transformant l’enregistrement spatial 3D en plans, coupes et modèles directement exploitables.
Ce flux de travail connecté permet aux données capturées par le système de cartographie mobile portable de s’intégrer dans une chaîne de traitement complète et maîtrisée, où chaque étape est optimisée pour fonctionner avec les données issues du RS7.
Étude de cas : relevé d’un projet de rénovation de 900 m² en 10 minutes
Un projet récent mené dans l’Indiana, aux États-Unis, a permis de démontrer concrètement les performances du CHCNAV RS7 sur le terrain. L’objectif consistait à capturer un relevé spatial complet d’une ancienne piscine de 900 m² en cours de transformation en salle de sport polyvalente. Le projet a été piloté par Renaissance Design Build, Inc., avec l’appui d’iGage Mapping Corporation pour les opérations de numérisation.
À gauche : site de rénovation d’une ancienne piscine dans l’Indiana, destinée à être convertie en salle de sport polyvalente. En haut à droite : méthode traditionnelle de relevé intérieur reposant sur des mètres rubans, des télémètres laser et des croquis manuels. En bas à droite : relevé réalisé avec le scanner portable SLAM, permettant de capturer un nuage de points 3D complet en un seul passage pour une cartographie intérieure rapide et précise.
La comparaison entre le flux de travail traditionnel et le flux de travail du RS7 est significative :
Métrique
Méthode traditionnelle
CHCNAV RS7
Taille de l'équipage
3 personnes
1 opérateur
Equipement
Ruban à mesurer, laser, croquis à main
Scanner SLAM portable
Temps d'acquisition des données
~190 minutes (façade partielle uniquement)
10 minutes (capture de la scène complète)
Couverture
Mesures partielles
Nuage de points 3D complet
Précision
Variable (erreurs de transcription manuelle)
À 1 cm près
Amélioration de la vitesse
19x plus rapide avec le RS7
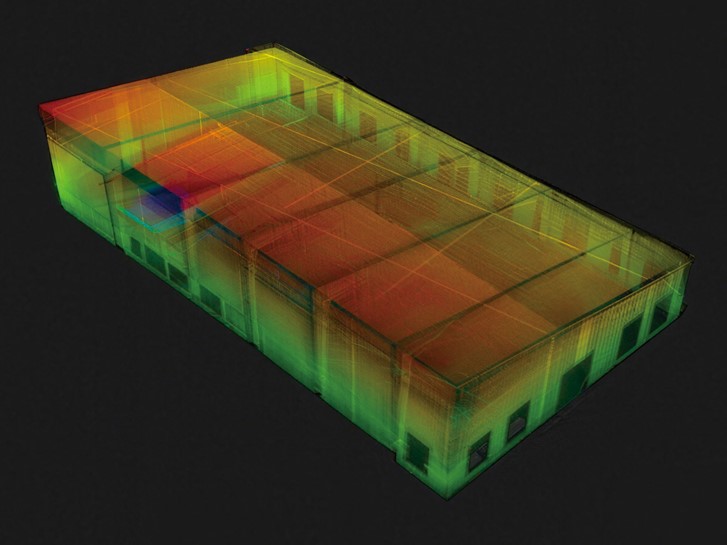
Avec une approche traditionnelle, l’équipe a consacré environ 190 minutes à relever partiellement les dimensions du site à l’aide de mètres rubans, de télémètres laser et de croquis manuels. À l’inverse, un seul opérateur équipé du RS7 a réalisé l’acquisition complète des données en 10 minutes, en capturant l’ensemble de l’intérieur avec une précision de l’ordre de 1 cm. Le nuage de points obtenu constitue un enregistrement spatial complet de l’installation, directement exploitable pour produire des plans d’étage, des coupes, des élévations et pour appuyer la coordination de la conception du projet de rénovation.
Nuage de points colorisé à haute densité de l'installation intérieure capturé avec le RS7, traité dans le logiciel CoProcess, fournissant un enregistrement spatial 3D complet et réutilisable.
Comparaison du coût total de possession sur 1 an
Au-delà du gain de temps observé sur un projet unique, l’étude de cas a également évalué le coût total de possession sur une année complète de relevés d’état des lieux, sur la base de 24 projets par an :
Facteur de coût
Méthode traditionnelle
Flux de travail du scanner RS7
Coût annuel de la main-d'œuvre et de l'équipement
252 000 $/an
(10 jours x 3 équipes x 350 $/jour x 24 projets)
Ces résultats montrent un scénario dans lequel l’investissement dans un scanner laser portable professionnel est amorti en moins de deux projets. Pour les entreprises qui réalisent chaque année plusieurs opérations de rénovation, d’aménagement ou de documentation d’installations, la logique économique est claire: l’équipement est rentabilisé presque immédiatement, tandis que chaque projet supplémentaire génère des gains directs en temps et en coûts de main-d’œuvre.
Transformer une visite de site en un actif 3D réutilisable
L'intérêt d'un scanner SLAM portable pour les relevés intérieurs ne tient pas uniquement à sa rapidité par rapport aux méthodes au ruban et au télémètre laser. Son apport le plus déterminant est plus structurel : il transforme la nature même du résultat issu d’une seule visite de site. Au lieu de produire une série de mesures répondant à un besoin ponctuel, il génère un enregistrement spatial complet, capable de servir de multiples usages tout au long du projet.
À partir d’un même jeu de données, il devient possible de produire des plans d’étage, des coupes, des élévations, des modèles 3D, des documents de coordination de conception et des évaluations ultérieures des conditions existantes. Lorsqu’une question surgit plusieurs mois après l’acquisition, le nuage de points reste disponible pour y répondre, sans nouvelle visite sur site ni dépendance à des notes incomplètes ou à une mémoire approximative de l’espace.
Pour les équipes engagées dans la rénovation, la gestion des installations, la documentation patrimoniale ou toute autre discipline où les conditions intérieures doivent être relevées avec précision et communiquées clairement, cette transition d’une mesure à usage unique vers un actif 3D réutilisable représente un changement majeur. Elle réduit les retours sur site, raccourcit les cycles de projet et renforce la fiabilité des livrables à chaque étape.
Consultez la méthodologie détaillée, les étapes de traitement des données et les indicateurs de performance du projet de numérisation intérieure avec le RS7 : Télécharger l'étude de cas complète sur le CHCNAV RS7.
____
À propos de CHC Navigation
CHC Navigation (CHCNAV) développe des solutions avancées de cartographie, de navigation et de positionnement, conçues pour renforcer la productivité et l’efficacité sur le terrain. Au service des secteurs du géospatial, de l’agriculture, du contrôle machine et de l’autonomie, CHC Navigation propose des technologies innovantes qui accompagnent les professionnels dans l’optimisation de leurs opérations et l’évolution de leurs pratiques. Présente dans plus de 140 pays et appuyée par une équipe de plus de 2 200 professionnels, CHC Navigation est reconnue comme un leader de référence dans l’industrie géospatiale et au-delà. Pour plus d'informations sur CHC Navigation [Huace:300627.SZ], veuillez consulter : https://www.chcnav.com/about/overview
Vous avez une question sur nos solutions ou nos opportunités de distribution ?