Ein intelligenter Arbeitsablauf für die Innenraumvermessung: Handgehaltenes SLAM-Scannen mit dem CHCNAV RS7
2026-04-10
Renovierungs- und Bestandsprojekte in Innenräumen scheitern selten während der Messung. Häufiger treten Unsicherheiten zu einem späteren Zeitpunkt auf, wenn unvollständige Bauunterlagen, unzusammenhängende Skizzen und fehlender räumlicher Kontext die Entwurfs-, Koordinierungs- und Designentscheidungen beeinflussen. Hier gewinnt das handgeführte SLAM-Scannen an Bedeutung. Der handgeführte SLAM-Scanner CHCNAV RS7 wurde für Gebäude- und Innenraumanwendungen entwickelt und unterstützt Teams bei der Erfassung von Innenraumdaten mit hoher Dichte, um schneller zu wiederverwendbaren Ergebnissen zu gelangen. SLAM (Simultaneous Localisation and Mapping) ermöglicht es dem Scanner, seine eigene Position zu verfolgen, während er in Echtzeit eine 3D-Punktwolke erstellt, ohne sich auf GNSS-Signale oder vorab platzierte Ziele zu verlassen.
Der veränderte Arbeitsablauf: Von isolierten Messungen zu einem wiederverwendbaren räumlichen Datensatz
Traditionelle Arbeitsabläufe bei der Innenraumvermessung folgen einem bekannten Muster. Ein Team trifft mit Maßbändern, Laserdistanzmessern und Notizblöcken vor Ort ein. Sie zeichnen Maße auf, skizzieren Grundrisse und fotografieren wichtige Details. Sie verlassen den Ort mit Messungen, die später interpretiert, neu gezeichnet und mit Skizzen abgeglichen werden müssen, die möglicherweise nicht die ganze Geschichte erzählen. Wurde ein Maß übersehen oder war eine Raumverbindung unklar, ist ein erneuter Besuch erforderlich.
Mit einem tragbaren LiDAR-Scanner ändert sich diese Dynamik grundlegend. Anstatt isolierte Messungen vorzunehmen, geht der Bediener durch den Raum und erfasst eine kontinuierliche, hochdichte 3D-Punktwolke. Das Ergebnis ist nicht eine Reihe von Zahlen, die später rekonstruiert werden müssen. Es handelt sich um einen räumlichen Datensatz, der Grundrisse, Schnitte, Ansichten, BIM-Modellierung, Entwurfskoordination und spätere Validierung unterstützt - und das alles auf der Grundlage desselben Datensatzes.
Damit verschiebt sich die Kernfrage von "Haben wir genug gemessen?" zu "Wie viel können wir mit den erfassten Daten machen?" Ein einziger Besuch vor Ort wird zur Erstellung eines wiederverwendbaren 3D-Assets und nicht zu einer einmaligen Feldübung.
Der CHCNAV RS7 erfasst kontinuierlich 3D-Punktwolkendaten, während der Bediener durch Innenräume geht, und ersetzt so die manuelle Messung durch eine wiederverwendbare räumliche Aufzeichnung.
Wie der RS7 die Herausforderungen beim Scannen von Innenräumen meistert
Stabiles Tracking in merkmalsarmen Räumen
Die Qualität von 3D-Scans in Innenräumen hängt stark von der Stabilität der Flugbahn ab. Der Scanner muss seine eigene Position genau verfolgen, während er sich durch das Gebäude bewegt. In Räumen mit klarer Geometrie, Möbeln und architektonischen Merkmalen ist dies einfach. Schwieriger wird es in Korridoren, Treppenhäusern, Versorgungswegen und sich wiederholenden Innenräumen, wo die umgebende Geometrie nur begrenzte Referenzpunkte für den SLAM-Algorithmus bietet.
Der CHCNAV RS7 löst dieses Problem mit einer Kombination aus INS (Inertial Navigation System) und SLAM-Verarbeitung, die durch eine hochpräzise IMU mit einer Abweichungsinstabilität von weniger als 0,5 Grad/h unterstützt wird. Das bedeutet, dass der Scanner selbst in sich geometrisch wiederholenden Räumen stabile Trajektorienschätzungen beibehält und sauberere Punktwolken mit weniger Ausrichtungsartefakten erzeugt.
Vollständige Innenraumgeometrie in kürzerer Zeit
Bei der Erfassung von Innenräumen kommt es auf Geschwindigkeit an, aber nur, wenn die Erfassung vollständig ist. Fehlende Decken, überhängende Strukturen oder enge Ecken bedeuten Lücken im Datensatz, und Lücken bedeuten erneute Besuche oder Rätselraten beim Entwurf. Der RS7 erfasst bis zu 1,15 Millionen Punkte pro Sekunde über ein extrem breites Sichtfeld von 360 x 189 Grad. Diese nahezu kugelförmige Abdeckung bedeutet, dass Decken, Ecken und Überkopf-Elemente auf natürliche Weise erfasst werden, während der Bediener geht, ohne das Gerät anhalten, neu positionieren oder neigen zu müssen.
Für den Bediener bedeutet dies auch weniger Haltungswechsel und weniger unterbrochene Scanpfade. Der Arbeitsablauf bleibt fließend, was sowohl zur Scanqualität als auch zum Bedienerkomfort bei längeren Erfassungssitzungen beiträgt.
Von der Geometrie zu visuellen Ergebnissen
Rohe Geometrie ist wichtig, aber viele Projektbeteiligte benötigen auch visuellen Kontext. Mit zwei 12-MP-HD-Kameras mit Sony Binning-Technologie kann der RS7 selbst bei schlechten Lichtverhältnissen in Innenräumen hochwertige Bilder aufnehmen. Diese Bilder fließen über die HPGS 2.0 Rendering-Engine in kolorierte Punktwolken und 3D Gaussian Splatting (3DGS) ein und erzeugen neben den geometrischen Daten auch fotorealistische visuelle Modelle.
Diese visuelle Ebene hilft den Teams bei der Überprüfung von Oberflächen, Öffnungen, Einrichtungsgegenständen und Verkehrsflächen, ohne den Standort erneut aufsuchen zu müssen. Bei Vermessungsprojekten für Renovierungen, bei denen die bestehenden Bedingungen den Planern und Auftragnehmern klar vermittelt werden müssen, ist diese Kombination aus Geometrie und visuellem Kontext besonders wertvoll.
Vom Feld ins Büro: Ein vernetzter Verarbeitungsprozess
Die Erfassung von Qualitätsdaten vor Ort ist nur ein Teil der Herausforderung. Der Weg vom Rohscan zum verwertbaren Ergebnis muss effizient sein und gut unterstützt werden. Der RS7 passt in einen dreistufigen Verarbeitungsprozess:
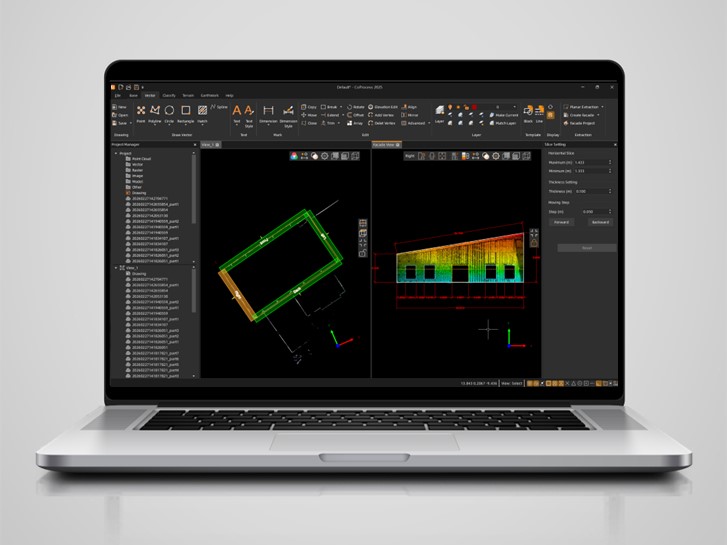
Routenplanung und Datenerfassung: Die SmartGo-Software übernimmt die Datenerfassung und bietet eine Echtzeit-Punktwolkenvorschau im Feld, so dass die Bediener die Abdeckung überprüfen können, bevor sie den Standort verlassen.
Datenoptimierung:CoPre und CoCloud übernehmen die Optimierung der Punktwolke, die Georeferenzierung, die Einfärbung und die Filterung und bereiten die Rohdaten für die Weiterverarbeitung vor.
Datenvektorisierung:CoProcess 2025 bietet Punktwolkenmanagement, Merkmalsextraktion und CAD-Erzeugung (.dwg/.dxf) und verwandelt die 3D-Raumdaten in Grundrisse, Schnitte und Modelle, die Projektteams benötigen.
Dieser vernetzte Arbeitsablauf bedeutet, dass die vom mobilen Handheld-Kartierungssystem erfassten Daten eine unterstützte Pipeline von der Erfassung vor Ort bis zur endgültigen Bereitstellung durchlaufen, wobei jede Stufe auf die Ausgabe des RS7 abgestimmt ist.
Fallstudie: 900 Quadratmeter Renovierungsübersicht in 10 Minuten
Bei einem kürzlich durchgeführten Projekt in Indiana, USA, wurde das CHCNAV RS7 einem Praxistest unterzogen. Die Aufgabe bestand darin, vollständige räumliche Daten für ein 900m2 großes ehemaliges Schwimmbad zu erfassen, das in eine Mehrzweck-Sporthalle umgebaut wurde. Das Projekt wurde von Renaissance Design Build, Inc. geleitet und von der iGage Mapping Corporation mit Scans unterstützt.
Links: Renovierung eines ehemaligen Schwimmbads in Indiana, das für den Umbau in eine Mehrzweck-Sporthalle vorbereitet wird. Oben rechts: Traditionelle Innenvermessung mit Maßband, Laserdistanzmesser und Handskizzen. Unten rechts: Die Vermessung mit dem tragbaren SLAM-Scanner ermöglicht eine vollständige 3D-Punktwolkenerfassung in einem einzigen Durchgang für eine schnelle und genaue Innenraumkartierung.
Der Vergleich zwischen dem traditionellen Arbeitsablauf und dem RS7-Arbeitsablauf war signifikant:
Metrik
Traditionelle Methode
CHCNAV RS7
Größe der Besatzung
3 Personen
1 Bediener
Ausrüstung
Maßband, Laser, Handskizze
SLAM-Handheld-Scanner
Zeit der Datenerfassung
~190 Minuten (nur Teilfassade)
10 Minuten (vollständige Erfassung der Szene)
Erfassungsbereich
Partielle Messungen
Vollständige 3D-Punktwolke
Genauigkeit
Variabel (manuelle Transkriptionsfehler)
Innerhalb von 1 cm
Verbesserung der Geschwindigkeit
19x schneller mit dem RS7
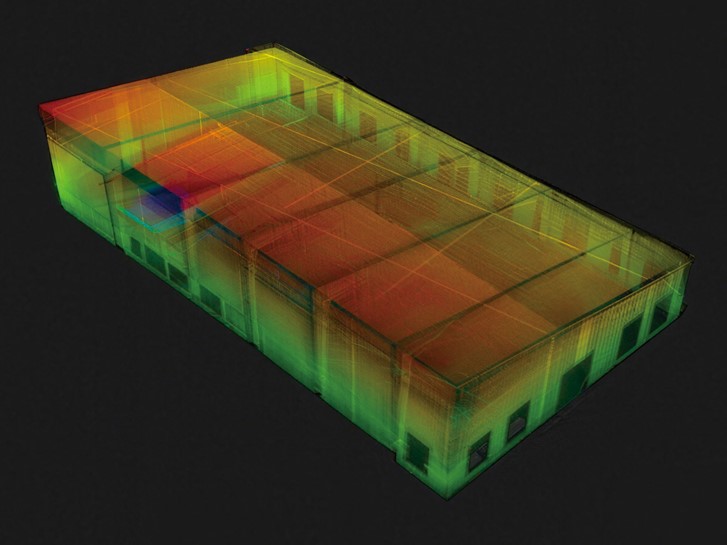
Das herkömmliche Team benötigte etwa 190 Minuten für die Vermessung von Fassadenteilen mit Maßband, Laser und Handskizzen. Ein einziger Bediener mit dem RS7 konnte die Datenerfassung der gesamten Szene in 10 Minuten abschließen und den gesamten Innenraum mit einer Genauigkeit von bis zu 1 cm erfassen. Die daraus resultierende Punktwolke lieferte eine vollständige räumliche Aufzeichnung des Gebäudes, die für Grundrisse, Schnitte, Ansichten und die Koordinierung des Renovierungsdesigns verwendet werden konnte.
Hochdichte kolorierte Punktwolke der Innenanlage, die mit dem RS7 erfasst und in der CoProcess-Software verarbeitet wurde, um eine vollständige und wiederverwendbare 3D-Raumaufzeichnung zu erhalten.
1-Jahres-Vergleich der Gesamtbetriebskosten (TCO)
Neben der Zeitersparnis bei einem einzelnen Projekt wurden in der Fallstudie auch die Gesamtbetriebskosten für ein ganzes Jahr mit Bestandsvermessungen untersucht, wobei von 24 Projekten pro Jahr ausgegangen wurde:
Kostenfaktor
Traditionelle Methode
RS7 Scanner Arbeitsablauf
Jährliche Arbeitskosten und Ausrüstung
252.000 $/Jahr
(10 Tage x 3 Mitarbeiter x $350/Tag x 24 Projekte)
Die Zahlen spiegeln ein Szenario wider, in dem sich der Scanner in weniger als zwei Projekten amortisiert. Für Unternehmen, die mehrere Renovierungs-, Bestands- oder Anlagendokumentationsprojekte pro Jahr abwickeln, ist die Kostenrechnung einfach: Die Investition in die Ausrüstung amortisiert sich fast sofort, und jedes nachfolgende Projekt bedeutet eine direkte Arbeits- und Zeitersparnis.
Ein Besuch vor Ort in ein wiederverwendbares 3D-Asset verwandeln
Der Wert eines tragbaren SLAM-Scanners für die Vermessung von Innenräumen liegt nicht nur darin, dass er schneller ist als Band und Laser. Der tiefere Vorteil ist struktureller Natur: Er verändert das Ergebnis einer einzigen Ortsbegehung. Anstelle einer Sammlung von Messungen, die nur einem Zweck dienen, wird eine vollständige räumliche Aufzeichnung erstellt, die vielen Zwecken dient.
Grundrisse, Schnitte, Ansichten, 3D-Modelle, Dokumente zur Designkoordination und zukünftige Zustandsbewertungen können alle aus demselben Datensatz abgeleitet werden. Wenn sechs Monate nach der Besichtigung eine Frage auftaucht, ist die Punktwolke immer noch verfügbar, um sie zu beantworten. Es ist nicht notwendig, einen erneuten Besuch zu planen oder sich auf die Erinnerung eines Mitarbeiters an den Raum zu verlassen.
Für Teams, die in den Bereichen Renovierung, Gebäudemanagement, Dokumentation von Baudenkmälern oder in anderen Disziplinen arbeiten, in denen die Innenraumbedingungen genau erfasst und klar kommuniziert werden müssen, reduziert diese Umstellung von einmaligen Messungen auf ein wiederverwendbares 3D-Asset die Anzahl der wiederholten Besuche, verkürzt die Projektlaufzeiten und verbessert die Lieferzuverlässigkeit auf der ganzen Linie.
CHC Navigation (CHCNAV) entwickelt fortschrittliche Kartierungs-, Navigations- und Positionierungslösungen, die die Produktivität und Effizienz steigern.Das Unternehmen beliefert Branchen wie Geodaten, Landwirtschaft, Maschinensteuerung und Autonomie,CHCNAV liefert innovative Technologien, die Fachleute befähigen und den Fortschritt in der Branche vorantreiben.Mit einer weltweiten Präsenz in über 140 Ländern und einem Team von mehr als 2.200Fachleuten ist CHC Navigation als führend in der Geospatial-Industrie und darüber hinaus anerkannt.Weitere Informationen über CHC Navigation [Huace:300627.SZ] finden Sie unter: https: //www.chcnav.com/about/overview
Haben Sie eine Frage zu unseren Lösungen oder Händlermöglichkeiten?