A gestão de grandes reservatórios de água pode ser um desafio ao longo do tempo devido a informações geográficas inexactas ou desactualizadas, resultando em discrepâncias entre os dados reais e os dados iniciais do projeto. Para manter eficazmente os reservatórios, é essencial utilizar métodos de medição avançados, como a cartografia com scanners LiDAR e veículos não tripulados, que ajudam a fornecer atempadamente uma monitorização e cálculo precisos do volume de armazenamento de água, bem como a previsão e simulação das condições hidrológicas.
SOBRE O PROJECTO
Neste projeto de um dia, foi demonstrado que a utilização de um USV hidrográfico para obter mapeamento subaquático e de um UAV equipado com um scanner LiDAR para obter os limites do reservatório e dados topográficos resulta na gestão simplificada e eficiente de grandes reservatórios de água. O USV APACHE 3 com ecossonda de feixe único e o scanner AA450 LiDAR instalado no veículo aéreo não tripulado foram utilizados para realizar medições acima e abaixo do nível da água. Além disso, uma antena inteligente GNSS RTK foi utilizada como estação de base.
FASE 1 - REALIZAÇÃO DO LEVANTAMENTO BATIMÉTRICO
Um levantamento batimétrico consiste em três etapas principais: preparação, medição e processamento de dados.
Etapa 1. Preparação.
Antes do levantamento, como não havia uma rede GNSS RTK disponível, é necessário instalar uma estação base GNSS, definir pontos de controlo e realizar a calibração do local para estabelecer um referencial de mapeamento. Para os objectivos de medição, podemos definir antecipadamente a rota no software; depois, o barco será medido automaticamente ao longo da rota (o que foi feito neste projeto), ou podemos usar o controlo remoto para operar o barco durante a próxima etapa deste levantamento.
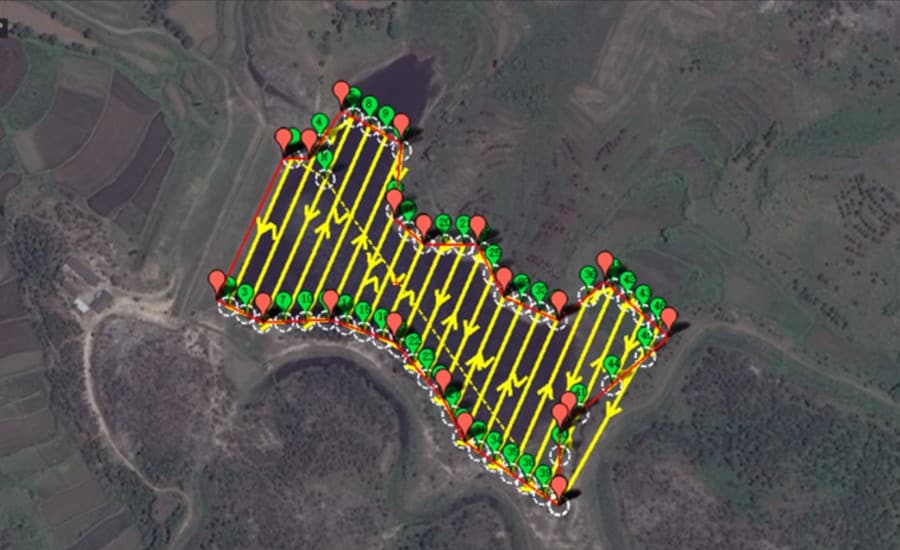
Figura 1. Planeamento da rota para a navegação autónoma da USV Apache 3.
Etapa 2. Medição.
No processo de medição, o software localizou os pontos de acordo com a rota prescrita. A distância entre os pontos de ancoragem da linha de teste foi codificada de acordo com a proporção de medição para garantir que havia pontos de convergência com a linha de teste principal dentro do intervalo especificado. Cada linha de inspeção foi comparada com os pontos de cruzamento da linha principal de levantamento.

Figura 2. Drone marítimo Apache 3 USV com um ecobatímetro de feixe único.
Etapa 3. Processamento de dados.
O software CHCNAV HydroSurvey 7, fornecido com o Apache 3 USV, foi utilizado para gerir a recolha de dados em bruto, o mapeamento, o posicionamento, a visualização da trajetória em tempo real, o processamento de dados e os sistemas de coordenadas. O software integra a aquisição de dados e as funções de pós-processamento. Suporta dados padrão de profundidade de água GPGGA e SDDPT e formato DWG/DXF, com capacidades de edição, ocultação e visualização de camadas.
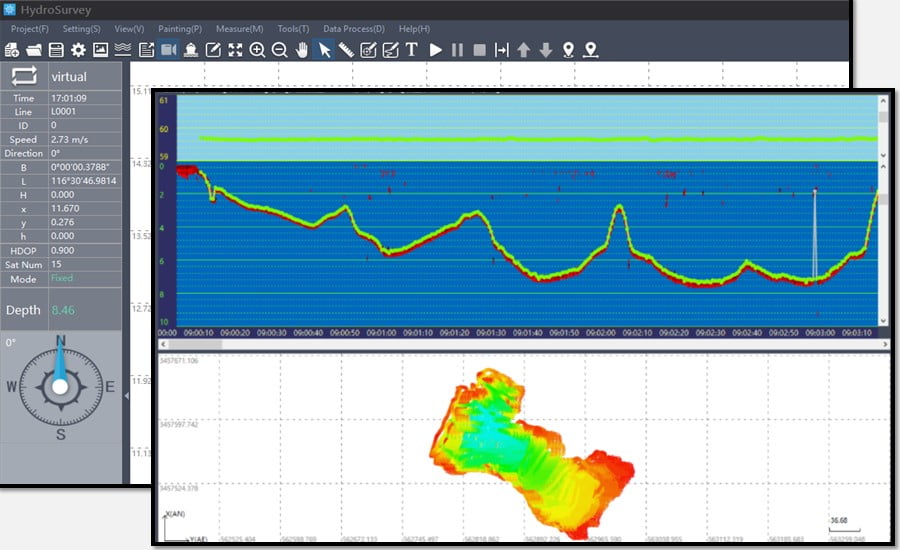
Figura 3. Processamento de dados no software HydroSurvey.
De acordo com as diferentes áreas das albufeiras sob diferentes altitudes, foi obtida e processada a capacidade de armazenamento correspondente.
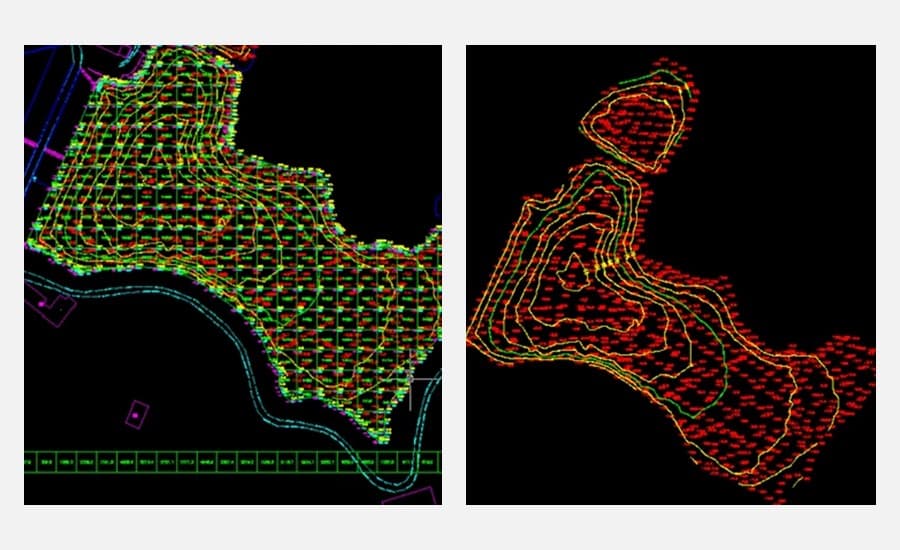
Figura 4. Elevação submarina e cálculo da área da albufeira e da capacidade de armazenamento.
FASE 2 - REALIZAÇÃO DO LEVANTAMENTO AÉREO
Tal como na fase anterior, existem três etapas para a realização de levantamentos aéreos: preparação, medição e processamento de dados.
Etapa 1. Preparação.
Antes de recolher os dados do scanner e da imagem com o veículo aéreo não tripulado (UAV) que transporta o sistema LiDAR+RGB (Alpha Air 450), foi necessário instalar uma estação de base GNSS num céu aberto perto do local do projeto. Dependendo do modelo da estação GNSS utilizada, os levantamentos aéreos podem ser realizados em modo de tempo real ou em modo de pós-processamento, registando dados estáticos.

Figura 5. Sistema AlphaAir 450 Lidar (AA450) com IMU incorporado, GNSS, scanner 3D e câmara RGB.
Passo 2. Aquisição de dados e imagens LiDAR
O scanner AA450 LiDAR possui um sistema de controlo de fluxo de trabalho de um toque que permite gerir qualquer levantamento com o premir de um botão. Quando os dados aéreos do projeto foram recolhidos, o software CHCNAV CoPre - um software de pré-processamento de digitalização a laser 3D fornecido com o AA450, foi utilizado para transferir os dados para o computador através de um cabo USB-C.
Etapa 3. Processamento de dados
Na primeira etapa, o software CoPre foi utilizado para combinar os dados laser em bruto e os dados POS para gerar dados de nuvens de pontos georreferenciados. Numa segunda etapa, a imagem bruta e os dados POS foram combinados para gerar um modelo ortométrico digital (DOM). Os dados da nuvem de pontos do solo foram classificados no software de pós-processamento de captura da realidade CoProcess para gerar o modelo digital de elevação (DEM).
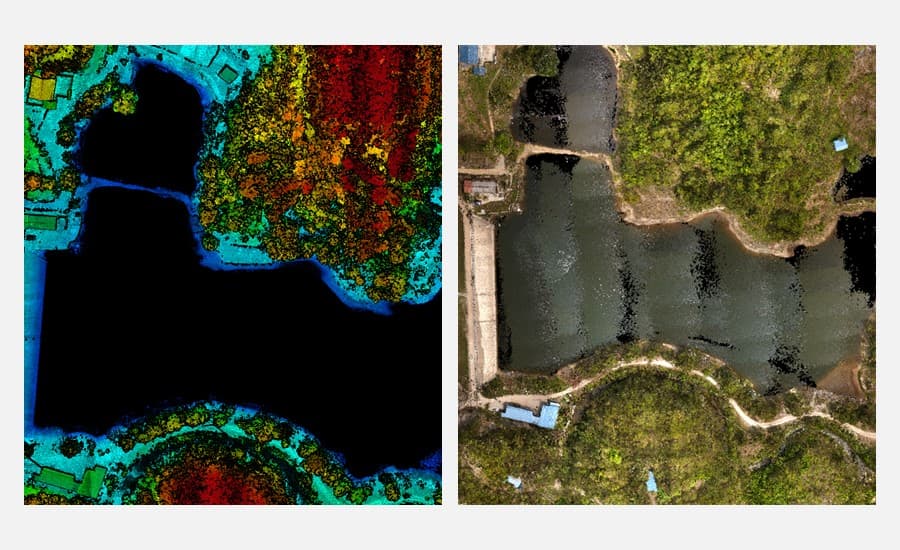
Figura 6. Dados originais da nuvem de pontos laser (esquerda) e nuvem de pontos colorida (direita).
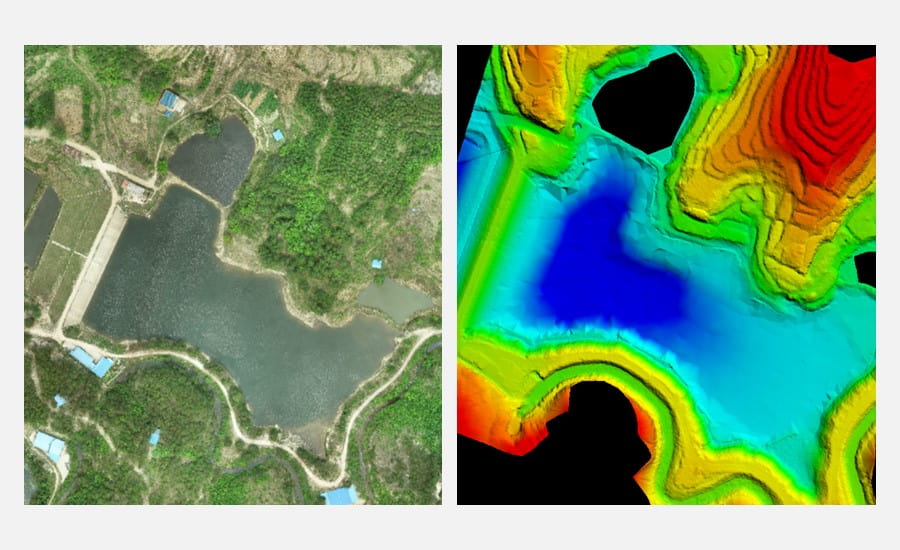
Figura 7. Reservatório DOM (esquerda) e DEM (direita) após o processamento dos dados.
FASE 3 - CÁLCULO DA CAPACIDADE DO RESERVATÓRIO DE ÁGUA
Nesta fase, foi criado o modelo virtual do reservatório. O nível de água em metros e a capacidade em metros cúbicos foram calculados de forma eficiente e precisa e apresentados no diagrama.
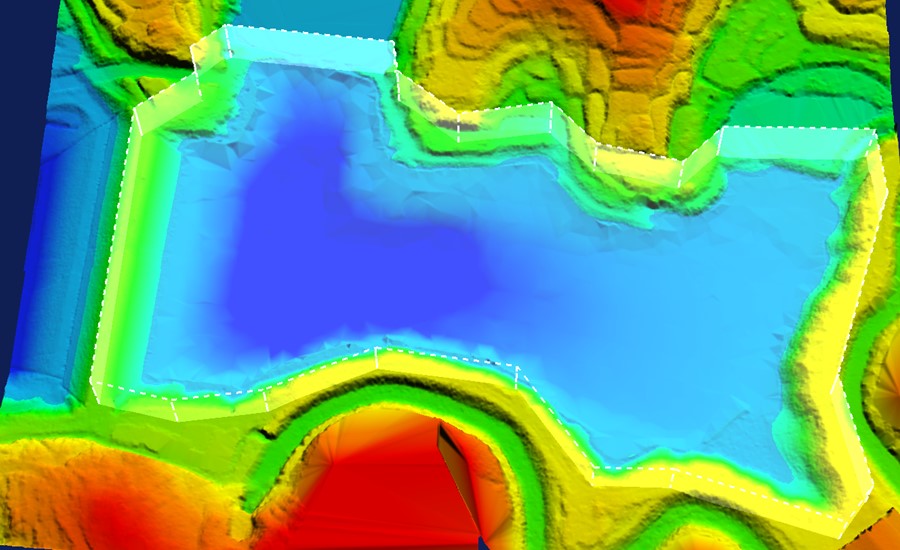
Figura 8. Modelação 3D da água disponível em comparação com o nível de água atual.
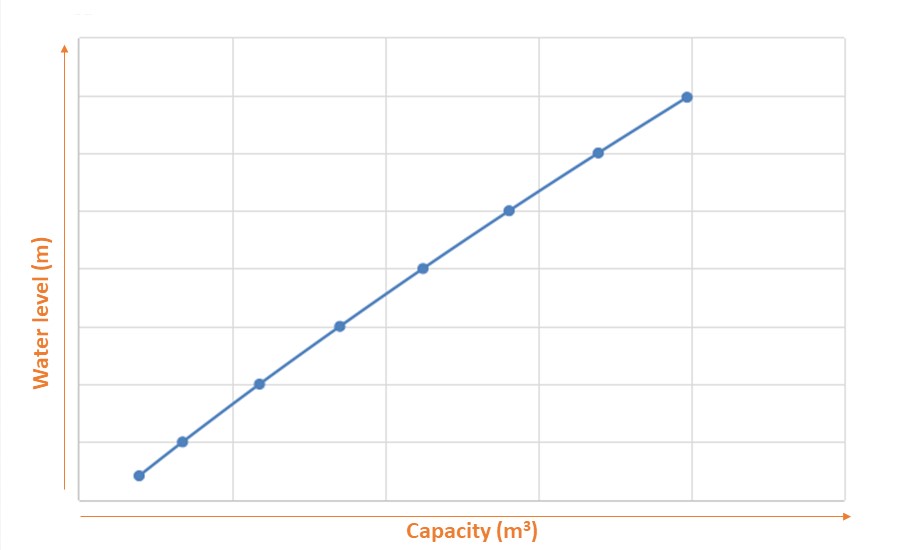
Figura 9. Diagrama da capacidade de água do reservatório.
Com a utilização de novas tecnologias, como scanners LIDAR, drones e USVs, é agora possível melhorar o nível de precisão e o tempo gasto na aquisição da topografia da albufeira e no cálculo da sua capacidade de armazenamento. Como resultado, os custos de levantamento são significativamente reduzidos e a eficiência do processo de manutenção a longo prazo é melhorada. Com o modelo digital do reservatório, os resultados dos levantamentos e mapeamentos podem ser enriquecidos, e os desenvolvimentos futuros podem ser simulados, monitorizados e previstos.
___
Sobre a CHCNAV
A CHC Navigation (CHCNAV) cria soluções inovadoras de navegação e posicionamento GNSS para tornar o trabalho dos clientes mais eficiente. Os produtos e soluções da CHCNAV abrangem vários sectores, como o geoespacial, a construção, a agricultura e a marinha. Com presença em todo o mundo, distribuidores em mais de 120 países e mais de 1.500 funcionários, a CHC Navigation é atualmente reconhecida como uma das empresas de crescimento mais rápido em tecnologias geomáticas.
