大規模な貯水池の管理は、不正確な地理情報や古い地理情報のために時間が経つにつれて困難となり、その結果、実際のデータと初期の設計データとの間に不一致が生じる可能性がある。貯水池を効果的に維持するためには、LiDARスキャナーによるマッピングや無人走行車など、正確なモニタリングや貯水量の計算、水文学的条件の予測やシミュレーションをタイムリーに提供するのに役立つ高度な測定手法を使用することが不可欠です。
プロジェクトについて
この1日プロジェクトでは、水中マッピングを得るために水路USVを使用し、貯水池の境界と地形データを得るためにLiDARスキャナーを搭載したUAVを使用することで、大規模貯水池の管理が簡素化され、効率的になることが実証された。 シングルビームエコサウンダーを搭載したAPACHE 3 USVと、無人航空機に搭載されたAA450 LiDARスキャナーは 、水面上と水面下の測定を行うために使用された。さらに、GNSS RTKスマートアンテナを基地局として運用した。
フェーズ1 - 水深測量の実施
水深測量は、準備、測定、データ処理の3つの主なステップで構成される。
ステップ1.準備
測量の前に、GNSS RTKネットワークが利用できないため、GNSSベースステーションを設置し、コントロールポイントを設定し、マッピングの基準を確立するためにサイトキャリブレーションを行う必要があります。計測の目標については、事前にソフトウェアでルートを設定しておくことができます。そうすれば、ボートはルートに沿って自動的に計測されます(このプロジェクトで作られたもの)。
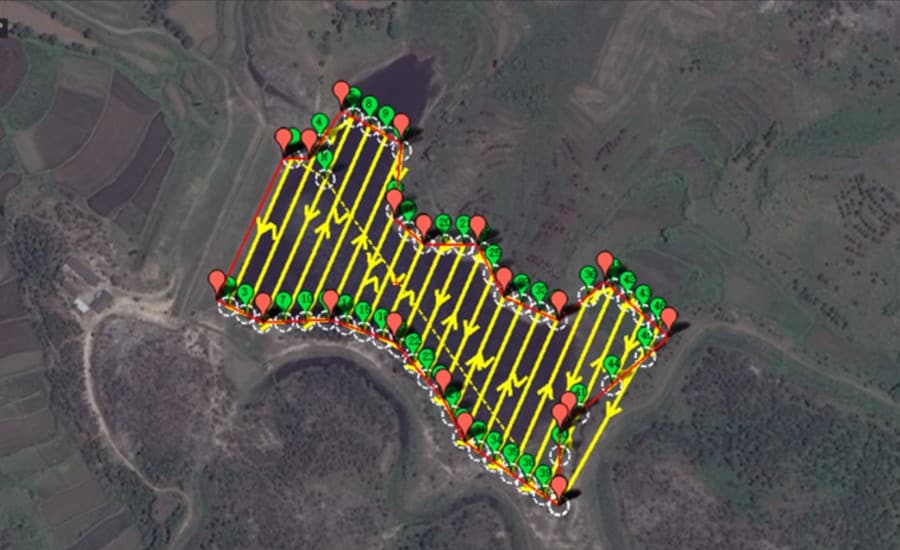
図1.アパッチ3USVの自律航行のためのルート計画。
ステップ2.計測。
測定のプロセスでは、ソフトウェアが所定のルートに従ってポイントを配置した。検査ラインのアンカーポイント間の距離は、指定された範囲内に主検査ラインと収束するポイントがあることを確認するため、測定比率に従って暗号化された。各検査ラインは、主測線との交点と比較された。

図2.シングルビームエコーサウンダーを搭載したアパッチ3USV海洋ドローン。
ステップ3.データ処理。
Apache 3 USVに付属するCHCNAV HydroSurvey 7ソフトウェアを使用して、生データの収集、マッピング、測位、リアルタイムの軌跡表示、データ処理、座標系を管理した。このソフトウェアは、データ収集と後処理機能を統合している。標準的なGPGGAとSDDPTの水深データとDWG/DXFフォーマットをサポートし、レイヤーの編集、非表示、表示機能を備えている。
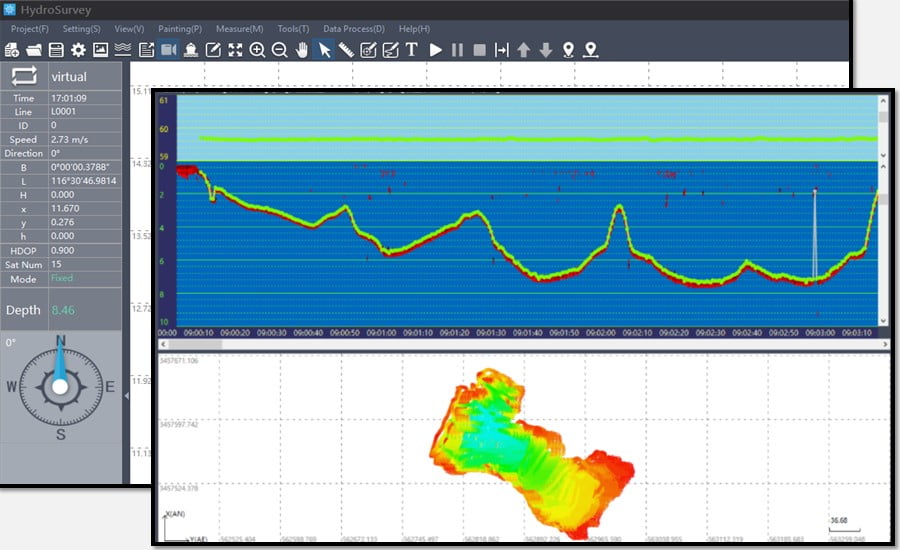
図3.HydroSurveyソフトウェアでのデータ処理。
異なる標高下の異なる貯水池面積に従って、対応する貯水容量が求められ、処理された。
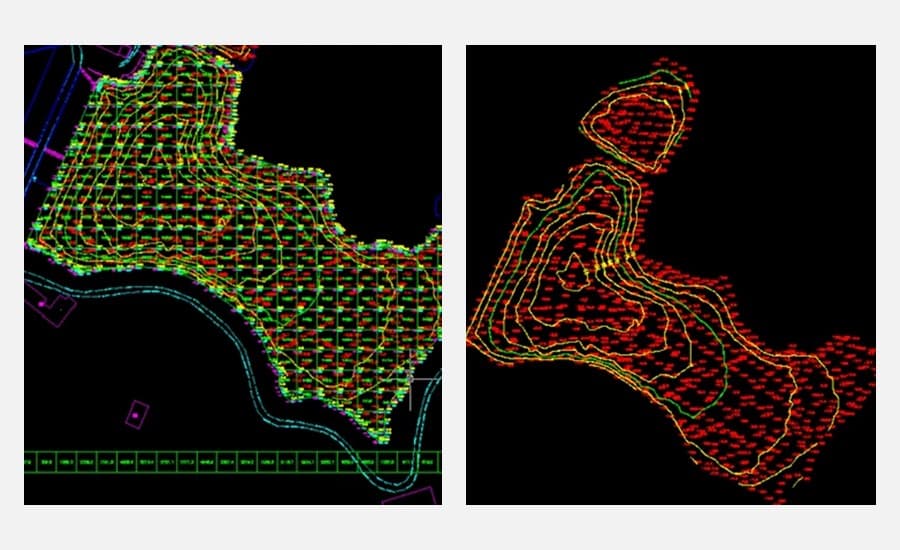
図4.水面下標高と貯水池面積および貯水容量の計算。
フェーズ 2 - 航空測量の実施
前段階と同様、航空測量の実施には、準備、測定、データ処理の3つのステップがある。
ステップ1.準備。
LiDAR+RGBシステム(Alpha Air 450)を搭載した無人航空機(UAV)でスキャナーと画像データを収集する前に、プロジェクトサイト近くの開けた空にGNSS基地局を設置する必要がある。 使用するGNSS基地局のモデルによって、航空調査はリアルタイムモードで行うことも、静的データを記録する後処理モードで行うこともできる。

図5 IMU、GNSS、3Dスキャナー、RGBカメラを内蔵したAlphaAir 450 Lidar (AA450)システム。
ステップ2.LiDARデータと画像の取得
AA450 LiDARスキャナーは、ワンタッチワークフローコントロールシステムを搭載しており、どのような調査もボタン1つで管理することができます。 プロジェクトの航空データを収集する際には、AA450に付属の3Dレーザースキャニング前処理ソフトウェアであるCHCNAV CoPreソフトウェアを使用して、USB-Cケーブル経由でデータをコンピューターに転送しました。
ステップ3.データ処理
最初のステップでは、CoPreソフトウェアを使用して、生のレーザーデータとPOSデータを組み合わせ、ジオリファレンス付きの点群データを生成した。第二のステップでは、生の画像とPOSデータを組み合わせてデジタルオルソメトリックモデル(DOM)を生成した。地上の点群データは、CoProcessリアリティキャプチャポスト処理ソフトウェアで分類され、デジタル標高モデル(DEM)が生成された。
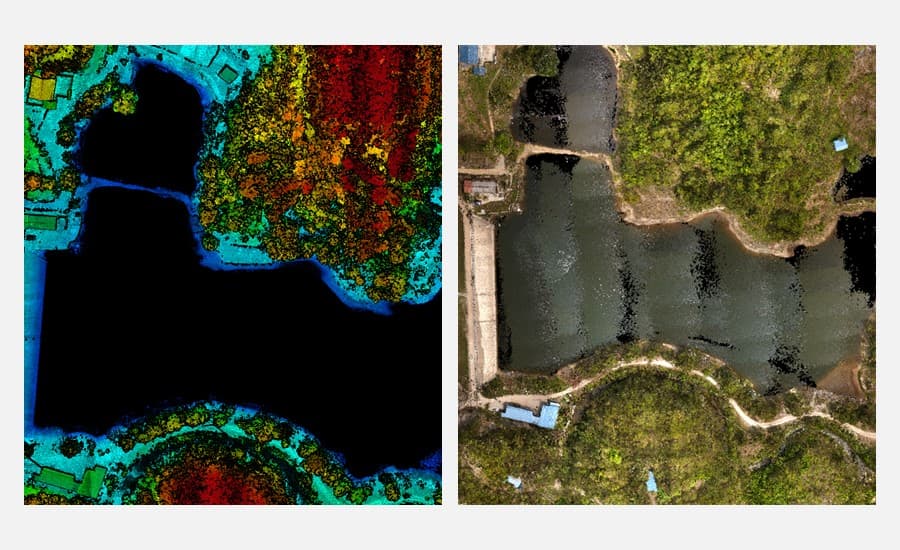
図6.元のレーザー点群データ(左)とカラー化された点群データ(右)。
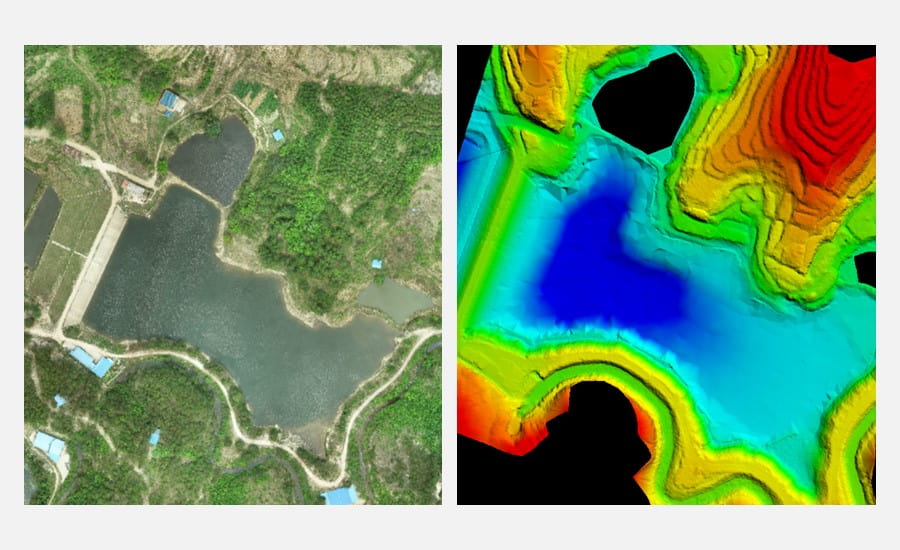
図7.データ処理後の貯水池DOM(左)とDEM(右)。
フェーズ 3 - 貯水池容量の計算
この段階で、貯水池の仮想モデルが作成された。メートル単位の水位と立方メートル単位の容量が効率的かつ正確に計算され、図上に表示された。
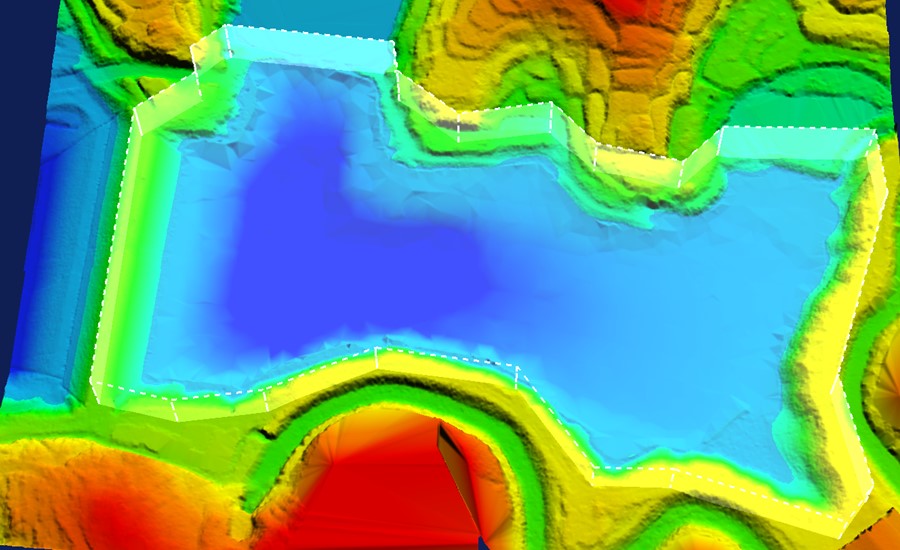
図8.現在の水位と比較した利用可能な水の3Dモデリング。
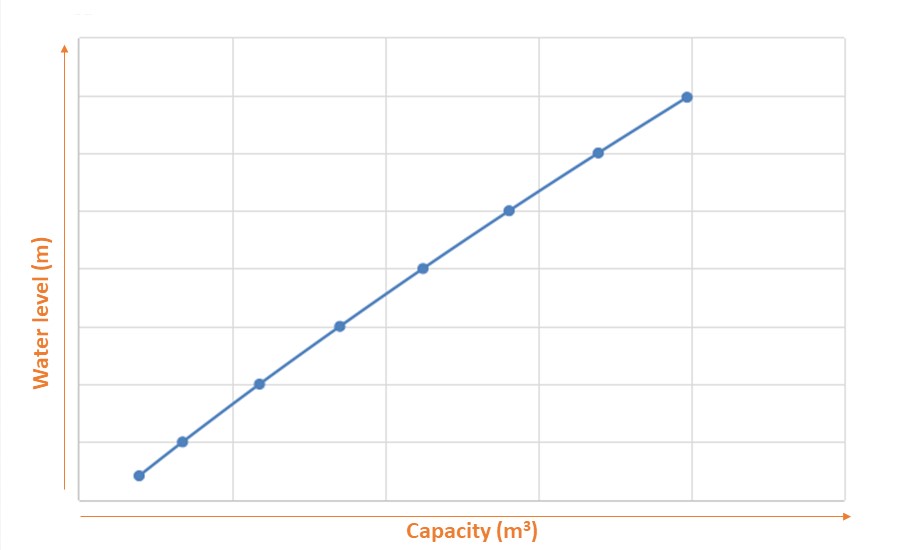
図9.貯水池の水容量の図。
LIDARスキャナー、ドローン、USVなどの新技術を利用することで、貯水池の地形取得や貯水容量の算出にかかる時間や精度を向上させることが可能になった。その結果、調査コストが大幅に削減され、長期的なメンテナンスプロセスの効率が向上する。貯水池のデジタルモデルにより、調査やマッピングの結果をより充実させ、将来の開発をシミュレーション、監視、予測することができます。
___
CHCNAVについて
CHCナビゲーション(CHCNAV)は、革新的なGNSSナビゲーションと測位ソリューションを創造し、お客様の作業をより効率的にします。CHCNAVの製品とソリューションは、地理空間、建設、農業、海洋などの複数の業界をカバーしています。世界中に拠点を持ち、120カ国以上に販売代理店を持ち、1,500人以上の従業員を擁するCHCナビゲーションは、今日、ジオマティクス技術において最も急成長している企業の1つとして認められています。
