Preguntas y respuestas de CHC Navigation con Byron Yuan: La visión detrás de la innovación de CHCNAV RS10
2025-04-18
Evolución de GNSS, SLAM y LiDAR en topografía
La búsqueda de datos geoespaciales precisos ha impulsado avances en las tecnologías de posicionamiento y cartografía, como los sistemas mundiales de navegación por satélite(GNSS), la detección y medición de distancias por luz(LiDAR) y la localización y cartografía simultáneas(SLAM).
El GNSS, impulsado por constelaciones como GPS (EE.UU.), GLONASS (Rusia), Galileo (UE) y BeiDou (China), revolucionó el posicionamiento con la llegada de los métodos cinemáticos en tiempo real (RTK) en la década de 1990. Las correcciones RTK mejoraron drásticamente la precisión, reduciendo los errores GNSS de metros a centímetros y permitiendo una geolocalización de alta precisión en tiempo real.
Mientras tanto, el LiDAR ha evolucionado hasta convertirse en una herramienta de teledetección madura que utiliza pulsos láser para crear nubes de puntos de alta resolución. Su capacidad para captar detalles topográficos intrincados lo ha hecho indispensable para aplicaciones como la inspección de infraestructuras y la gestión forestal.
LiDAR puede capturar el mundo real con nubes de puntos
Desarrollado originalmente para la robótica, el SLAM añadió una nueva dimensión al permitir a los dispositivos cartografiar y navegar por entornos desconocidos en tiempo real. Los avances en sensores e informática han ampliado la utilidad del SLAM a los vehículos aéreos no tripulados, la navegación autónoma y el modelado 3D.
Hoy en día, la integración de estas tecnologías está transformando los flujos de trabajo topográficos. Soluciones como la RS10 de CHCNAV combinan el posicionamiento absoluto de GNSS RTK, las capacidades de cartografía dinámica de SLAM y la rica recopilación de datos de LiDAR.
Entrevista con Byron Yuan, Director de CHCNAV 3D Mobile Mapping: La visión detrás del RS10
Byron Yuan, Director de Soluciones de Cartografía Móvil 3D de CHC Navigation, ofrece información sobre el innovador RS10, un sistema pionero que integra tecnologías GNSS y SLAM. En esta sesión de preguntas y respuestas, explora la evolución del sistema, sus características más destacadas y su potencial futuro. También destaca cómo el RS10 aborda retos topográficos críticos y establece nuevos estándares industriales de eficiencia y precisión.
¿Qué es el RS10 y en qué se diferencia de las soluciones GNSS tradicionales?
El RS10 es un sistema de cartografía móvil 3D que combina GNSS RTK, SLAM y LiDAR en una solución compacta y portátil. A diferencia de los dispositivos GNSS tradicionales, que dependen únicamente de las señales de satélite para el posicionamiento, el RS10 utiliza SLAM para mantener la precisión en zonas con señales GNSS limitadas o inexistentes, como bosques, cañones urbanos y espacios subterráneos.
Gracias a la integración de estas tecnologías, el RS10 proporciona cartografía y posicionamiento 3D fiables en tiempo real. Esta versatilidad lo hace adecuado para una amplia gama de aplicaciones, incluidos los estudios de obras de construcción y las inspecciones de infraestructuras.
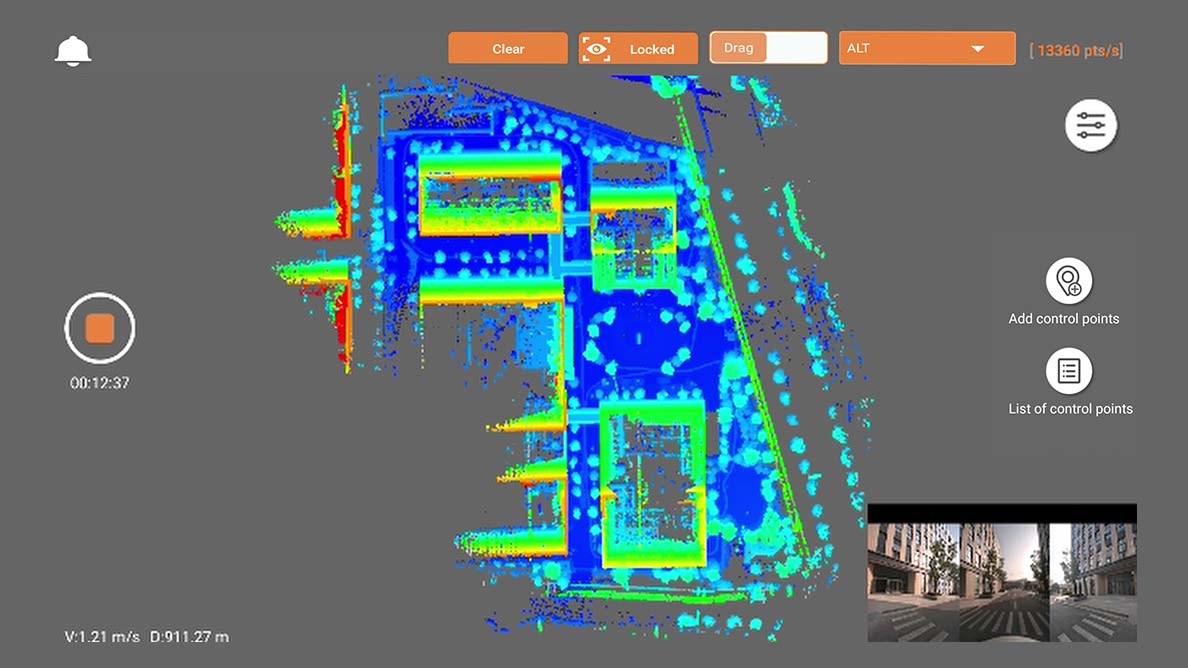
La visualización de nubes de puntos en tiempo real aumenta la eficacia del escaneado
¿Qué es la tecnología SLAM y cómo se integra con el GNSS RTK en el RS10?
Byron Yuan: SLAM, o localización y mapeo simultáneos, es una tecnología que utiliza sensores como cámaras, LiDAR y sistemas de navegación inercial para observar e interpretar el entorno al tiempo que crea un mapa. Desempeña un papel clave en aplicaciones como la cartografía, el modelado 3D y la navegación autónoma, incluida la evitación de obstáculos para robótica y drones.
En el RS10, adoptamos un enfoque único al acoplar estrechamente los datos de medición SLAM sin procesar con GNSS RTK. En lugar de combinar simplemente los resultados finales de SLAM y GNSS, este enfoque integra los datos a un nivel más profundo. Reconociendo la naturaleza diversa y dinámica de los entornos topográficos, el RS10 utiliza un algoritmo adaptativo para ajustar la ponderación de los datos SLAM y RTK en función de las condiciones ambientales. Este enfoque garantiza una precisión de posicionamiento y un rendimiento cartográfico óptimos a medida que cambian las condiciones.
La fusión de GNSS y SLAM ofrece ventajas únicas
¿Cuáles son las ventajas de esta integración?
Byron Yuan: El RS10 aprovecha los puntos fuertes tanto de los receptores GNSS como de los escáneres SLAM autónomos, ofreciendo ventajas significativas sobre cada uno de ellos.
Con los receptores GNSS, problemas como los errores de deslizamiento de ciclo -causados por interferencias de la señal procedentes de obstáculos como árboles, edificios o el terreno- pueden comprometer la precisión del posicionamiento. El RS10 resuelve este problema incorporando SLAM, que proporciona datos de posición estables en zonas con señales GNSS débiles o inexistentes, lo que garantiza una mayor eficacia y fiabilidad de las mediciones en las operaciones diarias.
Por otro lado, los escáneres SLAM independientes suelen sufrir errores de deriva acumulativos, en los que las imprecisiones aumentan a medida que el dispositivo se desplaza por el entorno. Estos sistemas suelen depender de puntos de control o correcciones externas para mantener la precisión. El RS10 supera esta limitación integrando GNSS RTK, que actúa como referencia en tiempo real para corregir los errores de deriva. Esto no sólo mejora la precisión de la topografía, sino que también reduce la necesidad de un extenso postprocesamiento.
Gracias a la combinación de estas tecnologías, el RS10 ofrece un posicionamiento preciso y una cartografía detallada que funciona eficazmente tanto en entornos con GNSS como en entornos con GNSS.
¿Qué inspiró el desarrollo del RS10?
Byron Yuan: A través de la investigación de mercado, identificamos varios puntos débiles a los que los topógrafos solían enfrentarse con los escáneres SLAM existentes. Entre ellos se encontraban la precisión limitada en entornos complejos, la dependencia de rutas de bucle cerrado para la corrección de errores y ecosistemas que carecían de facilidad de uso. Estos retos subrayaron la necesidad de una solución diseñada específicamente para el sector de la topografía. Esto nos inspiró para desarrollar el RS10, un sistema que integra a la perfección GNSS de alta precisión con tecnología SLAM para hacer frente a estas limitaciones.
La función Loop-Free elimina la necesidad de cerrar los bucles
¿A qué retos se enfrentaron durante el desarrollo del RS10?
Byron Yuan: El mayor reto era conseguir la gran precisión de medición que nos habíamos propuesto: una precisión absoluta de 5 cm y una relativa de 1 cm, independientemente del escenario. Estos ambiciosos objetivos exigieron importantes esfuerzos de innovación y tecnología.
A los seis meses de empezar el proyecto, empezamos a dudar de que los objetivos fueran alcanzables. Para superarlo, adoptamos un enfoque de desarrollo ágil que incluía métodos de prueba iterativos como los utilizados por SpaceX. Esto supuso construir prototipos de cara al cliente en las primeras fases del proceso.
Nuestro primer prototipo no alcanzó los objetivos de precisión y reveló problemas de ingeniería críticos. Por ejemplo, el motor que acciona la rotación del LiDAR -un componente clave para mantener una precisión de escaneado constante- requirió seis iteraciones de diseño a lo largo de un año antes de cumplir los estándares de rendimiento. Gracias a estas mejoras iterativas, fuimos resolviendo los problemas técnicos y, en última instancia, cumplimos los estrictos requisitos de precisión.
¿Cuáles son las principales características del RS10 que más le entusiasman?
Byron Yuan: Dos de las innovaciones más interesantes del RS10 son SFix y Vi-LiDAR, que redefinen los enfoques tradicionales del posicionamiento y la medición sin contacto.
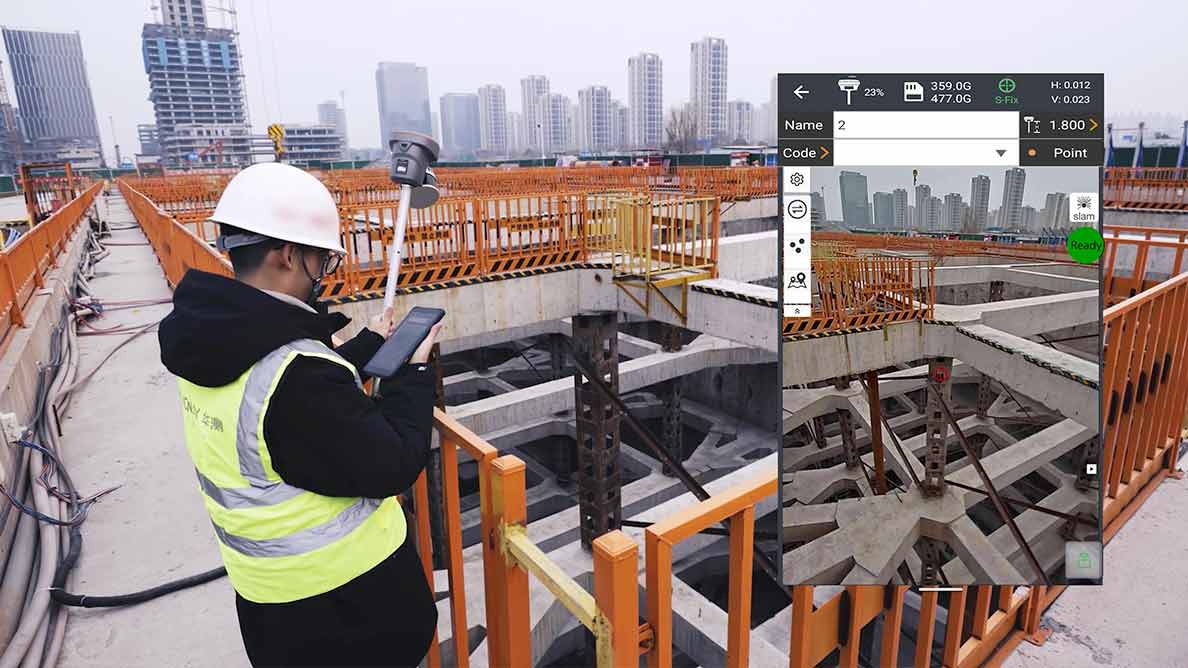
SFix aprovecha la estrecha integración de GNSS y SLAM para ofrecer una precisión de posición de hasta 5 cm en un minuto, incluso en entornos con señales GNSS obstruidas o interferidas. Esta capacidad hace que el RS10 sea muy versátil y permite aplicaciones como los estudios en interiores, donde las soluciones tradicionales basadas únicamente en GNSS no llegan.
Durante el proceso de desarrollo, nos propusimos revolucionar los flujos de trabajo de medición sin contacto mediante V-LiDAR mejorando tanto la eficiencia como la precisión. Inicialmente, el concepto se centraba en emplear LiDAR para capturar coordenadas de puntos específicos sobre el terreno, lo que requería una orientación manual.
Sin embargo, hemos avanzado en esta idea para eliminar la necesidad de apuntar con precisión. El RS10 introduce un flujo de trabajo innovador en el que los topógrafos pueden simplemente capturar una imagen del entorno y seleccionar directamente los puntos de medición en ella. Este enfoque no sólo mitiga los errores causados por los temblores de la mano, sino que también mejora significativamente la fiabilidad y la eficiencia, especialmente en zonas topográficas complejas o de difícil acceso, transformando el proceso de medición sin contacto.
Un topógrafo utiliza la función V-LiDAR
¿Cómo garantiza el RS10 un escaneado eficaz?
Byron Yuan: El escaneado eficiente se consigue gracias a varias innovaciones diseñadas para mejorar el rendimiento en aplicaciones reales.
Una innovación clave es nuestra tecnología Loop-Free, que elimina la necesidad de que los topógrafos vuelvan a visitar las zonas para cerrar los bucles. De este modo, se optimiza la ruta de exploración y se reduce el tiempo de medición sin sacrificar la precisión de los datos. Además, el RS10 incorpora baterías intercambiables en caliente, lo que permite un funcionamiento ininterrumpido y sesiones de exploración prolongadas sin necesidad de apagar el dispositivo.
Para mantener la fiabilidad y calidad de los datos, hemos introducido la función Precision Alert. Integrada en el sistema de visualización de nubes de puntos en tiempo real del RS10, proporciona información inmediata sobre la calidad de los datos. Los topógrafos pueden abordar los posibles problemas durante la exploración inicial, minimizando la necesidad de repetir las exploraciones y garantizando la captura de datos de alta calidad en la primera pasada.
¿Cómo ve el futuro de productos como el RS10?
Byron Yuan: La tecnología SLAM está llamada a transformar la topografía sustituyendo a herramientas tradicionales como las estaciones totales y los receptores GNSS RTK en más escenarios. A medida que aumente su adopción, esperamos avances significativos en los algoritmos SLAM para mejorar la precisión y la estabilidad. Al mismo tiempo, las soluciones de software serán más avanzadas y fáciles de usar para responder mejor a las distintas necesidades del sector.
De cara al futuro, la integración de SLAM con tecnologías de modelado visual y 3D mejorará aún más herramientas como la RS10. Por ejemplo, la combinación de SLAM con el modelado gaussiano en 3D podría permitir la creación de gemelos digitales de gran realismo que ofrezcan representaciones detalladas e interactivas de entornos físicos. Estas innovaciones podrían ampliar las aplicaciones de SLAM a campos como la ingeniería civil, la planificación urbana y la realidad virtual, creando nuevas oportunidades de eficiencia e innovación.
La innovación tecnológica del RS10 ofrece más posibilidades a los topógrafos
Reflexiones finales
El RS10 encarna el compromiso de CHC Navigation de ampliar los límites de la tecnología geoespacial mediante la integración perfecta de GNSS, SLAM y LiDAR. Como señala Byron Yuan, innovaciones como SFix y Vi-LiDAR responden eficazmente a los retos del sector y ofrecen precisión en entornos difíciles. Con sus avanzadas funciones, el RS10 no sólo redefine los flujos de trabajo topográficos tradicionales, sino que también sienta las bases para aplicaciones SLAM más amplias, abriendo nuevas posibilidades en el modelado 3D y la creación de gemelos digitales.
____
Acerca de CHC Navigation
CHC Navigation (CHCNAV) desarrolla soluciones avanzadas de cartografía, navegación y posicionamiento diseñadas para aumentar la productividad y la eficacia. Al servicio de sectores como el geoespacial, la agricultura, la construcción y la autonomía, CHCNAV ofrece tecnologías innovadoras que capacitan a los profesionales e impulsan el avance de la industria. Con una presencia mundial que abarca más de 140 países y un equipo de más de 2.000 profesionales, CHC Navigation es reconocido como líder en la industria geoespacial y más allá. Para más información sobre CHC Navigation [Huace:300627.SZ], visite: www.chcnav.com