¿Qué es la captura de la realidad? De la digitalización 3D a la captura de la realidad 3D
2025-11-10
¿Qué es la captura de la realidad?
Es el proceso integral de convertir el mundo físico en activos digitales fiables. Un flujo de trabajo de captura de la realidad combina sensores (LiDAR, cámaras, IMU, GNSS) y pasos de software (alineación, georreferenciación, QA/QC) para producir contenido medible: nubes de puntos, mallas, ortotipos, actualizaciones BIM y gemelos digitales.El escaneado 3D es una técnica dentro de ese flujo de trabajo: mide directamente la geometría (normalmente mediante láser). La captura de la realidad 3D hace hincapié en los resultados tridimensionales y georreferenciados listos para CAD/BIM/GIS y las decisiones sobre el terreno.
Un ejemplo actual y probado sobre el terreno es el RS10 de CHC Navigation, un sistema portátil que fusiona GNSS RTK + LiDAR + SLAM visual para producir nubes de puntos georreferenciados en tiempo real mientras se camina, tanto en interiores como en exteriores. En otras palabras, aúna el escaneado 3D rápido con toda la disciplina de la captura de realidad 3D, para que los equipos salgan del emplazamiento con datos localizados y utilizables en lugar de "escanea ahora, espera después".
Por qué el RS10 es importante para capturar la realidad
Los escáneres de trípode tradicionales ofrecen un detalle milimétrico exquisito, pero pueden ser lentos en emplazamientos grandes y complejos. El escáner RS10 resuelve esa carencia fusionando estrechamente el posicionamiento RTK con LiDAR-SLAM, lo que proporciona a los equipos de campo resultados de clase centimétrica e información instantánea.
Con un eficaz flujo de trabajo sin bucles, el RS10 elimina la necesidad del tradicional cierre de bucles al integrar las tecnologías GNSS y SLAM, simplificando la recopilación de datos sobre el terreno y reduciendo el tiempo y el esfuerzo de finalización del proyecto.
CHCNAV especifica una precisión absoluta de ~5 cm y relativa de ~1 cm, con nubes de puntos georreferenciadas en tiempo real en el controlador, para que pueda ver la cobertura en tiempo real y corregir las lagunas antes de recoger. Se pueden cartografiar in situ grandes superficies de hasta ~13.000 m².
Esta continuidad interior↔exterior es muy importante para instalaciones, campus, construcciones mixtas, servicios públicos y túneles. RTK en exteriores proporciona coordenadas absolutas; cuando se entra, SLAM lleva la trayectoria permaneciendo en el mismo sistema de coordenadas del proyecto, lo que evita tener que volver a georreferenciar posteriormente. En zonas débiles/sin GNSS (cañones urbanos, sótanos), el RS10 puede seguir calculando coordenadas de punto RTK precisas, lo que resulta útil cuando debe colocar las exploraciones en el lugar correcto incluso sin satélites.
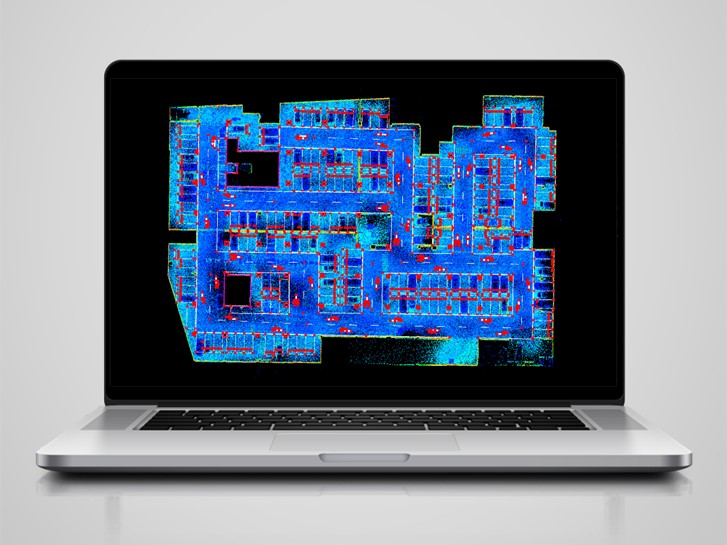
Izquierda: Un topógrafo recoge datos en un aparcamiento subterráneo utilizando un CHCNAV RS10. Derecha: Los datos del estudio se procesan y visualizan en el software CoProcess.
Especificaciones clave del rendimiento del escaneado 3D
Para los buscadores que comparan sistemas portátiles, estas especificaciones del RS10 son las esenciales:
Opciones LiDAR: 16 ó 32 líneas
Alcance: 120 m o 300 m
Frecuencia de exploración: 320k o 640k pulsos/s
FOV: unos 210° × 170° (hasta 2 retornos)
Imágenes: 3 cámaras de 5 MP (15 MP en total)
Precisión: < 5 cm absolutos (H/V), < 1 cm relativos
Resistencia: IP64
Alimentación: pilas intercambiables en caliente, ~60 min por paquete
La flexibilidad de montaje también es importante en los trabajos rápidos: el RS10 se puede llevar en la mano, en el pecho, en un poste o en un vehículo, por lo que un sistema se adapta a pasillos, salas de planta, exteriores largos o activos lineales sin necesidad de volver a montarlo.
Del escaneado 3D a la captura completa de la realidad en 3D
La diferencia entre el escaneado 3D y la captura de la realidad en 3D es lo que ocurre antes y después de que el láser incida en la escena. El RS10 ilustra el enfoque moderno:
Planificar la trayectoria, el sistema de coordenadas y el control.
Capture con GNSS+SLAM fusionados para que cada pasada contribuya a una trayectoria coherente.
Vea los resultados en tiempo real: aparece una nube de puntos georreferenciada a medida que avanza, lo que le permite realizar un control de calidad sobre el terreno (¿consiguió el núcleo de la escalera? ¿ese colector de tuberías?).
Entregue nubes de puntos/secciones/mallas limpias en CAD/BIM y GIS, con las coordenadas correctas desde el principio.
La georreferenciación en tiempo real es el punto de inflexión. En lugar de descubrir la falta de cobertura o la desviación en la oficina, los equipos corrigen en cuestión de minutos mientras están en la obra, lo que es vital para las ventanas de cierre, las zonas de acceso restringido y los costes sobre el terreno. CHCNAV RS10 admite el funcionamiento sin bucle, por lo que no se ve obligado a volver a visitar las mismas ubicaciones para cerrar trayectorias, lo que resulta práctico en espacios congestionados o peligrosos.
Donde brilla
Actualizaciones as-built y BIM: recorridos rápidos por interiores, fachadas, salas de instalaciones y pasillos; extraiga secciones o compárelas con el diseño el mismo día.
Servicios públicos e infraestructuras lineales: cartografíe subestaciones, galerías y servidumbres de paso sin saltos de trípode; los soportes para vehículos y postes aceleran los recorridos más largos.
Silvicultura/vegetación y zonas al aire libre: cubra el terreno rápidamente manteniendo las coordenadas coherentes para la detección de cambios y la comprobación de autorizaciones.
Zonas subterráneas y con problemas de GNSS: siga construyendo un modelo coherente incluso cuando desaparezcan los satélites y, a continuación, conéctelo con precisión al control del emplazamiento en las salidas.
Práctico objetivo de compra para capturar la realidad con la mano
Si estás evaluando herramientas para la captura de la realidad, ajusta tu lista de comprobación a las limitaciones del trabajo:
Precisión frente a velocidad: el trípode TLS sigue ganando en alineación milimétrica con tolerancias ajustadas. Pero cuando el horario, el acceso y la cobertura dominan, el GNSS+SLAM portátil le permite obtener un contexto fiable y listo para el estudio a gran velocidad. (La especificación < 5 cm absoluta / < 1 cm relativa del RS10 es una referencia útil).
Georreferenciación en tiempo real: La finalización "sobre el terreno" es enorme: asegúrese de que su dispositivo previsualiza una nube de puntos localizada y marca las lagunas en directo. El RS10 se ha creado en torno a esta idea y admite la cartografía en tiempo real de ~13.000 m².
Montaje y autonomía: busque varios modos de transporte y baterías intercambiables en caliente (unos 60 minutos por paquete en el RS10) para evitar caídas de productividad.
Ecosistema de flujo de trabajo: Considera cómo se mueven los datos en tu pila CAD/BIM/GIS y si las aplicaciones de campo ayudan a elegir proyecciones y gestionar coordenadas de forma coherente.
Conclusión
El CHCNAV RS10 es un ejemplo de cómo el escaneado 3D evoluciona hacia la captura de la realidad 3D: GNSS RTK + SLAM para la veracidad de las coordenadas, nubes de puntos georreferenciadas en tiempo real para la certeza sobre el terreno y especificaciones prácticas (LiDAR de 16/32 líneas, hasta 300 m de alcance, IP64, baterías intercambiables en caliente) que satisfacen las exigencias diarias de las obras. Si sus proyectos abarcan interiores y exteriores y valora la entrega rápida y segura de resultados, esta categoría (y el RS10 en concreto) merece un lugar en su lista de favoritos.
____
Acerca de CHC Navigation
CHC Navigation (CHCNAV) desarrolla soluciones avanzadas de cartografía, navegación y posicionamiento diseñadas para aumentar la productividad y la eficacia. Al servicio de sectores como el geoespacial, la agricultura, la construcción y la autonomía, CHCNAV ofrece tecnologías innovadoras que capacitan a los profesionales e impulsan el avance de la industria. Con una presencia mundial que abarca más de 140 países y un equipo de más de 2.000 profesionales, CHC Navigation es reconocido como líder en la industria geoespacial y más allá. Para más información sobre CHC Navigation [Huace:300627.SZ], visite: https://www.chcnav.com/about/overview
¿Tiene alguna pregunta sobre nuestras soluciones u oportunidades de concesión?